שלום לכם
בהמשך ליוזמתו של ארבל בנושא מיפגש הפורום בפסח (שלא יצא אל הפועל) , הבנתי שבעצם כמעט אף פעם לא ראינו פרוייקטים של חברי הפורום.
לכן, אני מתחיל שרשור פרויקטים.
בשרשור אציין את שם הפרויקט , ומטרתו
קישור לקבצים
וקישור לסרטים בנושא.
תשתדלו להוסיף פרויקטים לקישור , אולם להגיב אליהם מחוץ לקישור, כך שלא יהיה עומס בשירשור.
שירשור פרויקטים
54 הודעות
• עמוד 1 מתוך 4 • 1, 2, 3, 4
שירשור פרויקטים
![]() על ידי אמנון » ו' מאי 02, 2008 12:25 pm
על ידי אמנון » ו' מאי 02, 2008 12:25 pm
- אמנון
- רובוטריק

- הודעות: 2031
- הצטרף: ש' יולי 09, 2005 5:41 pm
- מיקום: חיפה
פרויקט מערכת יירוט מונחית ראיה ממוחשבת
![]() על ידי אמנון » ו' מאי 02, 2008 12:33 pm
על ידי אמנון » ו' מאי 02, 2008 12:33 pm
פרויקט מערכת יירוט מונחית ראיה ממוחשבת
הפרויקט בוצע ב 2008 במיכללת אורט הרמלין , ע"י רינת , אלירן ושי ובהנחייתי.
בפרויקט מוקמה מצלמת רשת על התיקרה , כאשר היא מכוונת לזירה קרקעית.
על הזירה הוצבו רובוט המדמה "טיל" ורובט המדמה מטרה (אשר בסרטון אינו נע)

התמונה מהמצלמה נרכשת בעזרת OPENCV (סיפריה חופשית ופשוטה לניתוח תמונה בשפת C ) לתוך קוד פשוט בשפת C .
בקוד נותחה התמונה, זוהו הטיל והמטרה, זוהה כיוון הטיל .
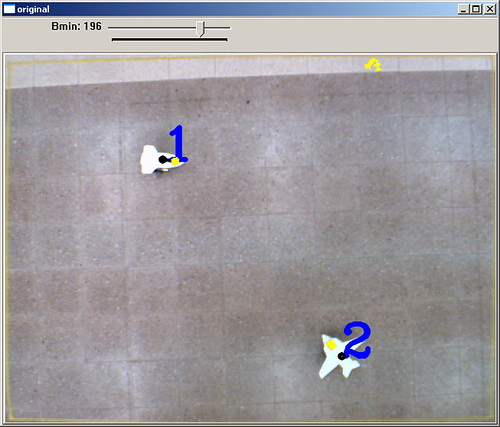
לאחר מכאן נשלחו מהקוד ,בעזרת משדר רדיו ,פקודות לטיל לנוע אל עבר המטרה.
בקישור הבא סרטון המדגים את המערכת
http://www.youtube.com/watch?v=5htI0zgip3U
אמנון
הפרויקט בוצע ב 2008 במיכללת אורט הרמלין , ע"י רינת , אלירן ושי ובהנחייתי.
בפרויקט מוקמה מצלמת רשת על התיקרה , כאשר היא מכוונת לזירה קרקעית.
על הזירה הוצבו רובוט המדמה "טיל" ורובט המדמה מטרה (אשר בסרטון אינו נע)
התמונה מהמצלמה נרכשת בעזרת OPENCV (סיפריה חופשית ופשוטה לניתוח תמונה בשפת C ) לתוך קוד פשוט בשפת C .
בקוד נותחה התמונה, זוהו הטיל והמטרה, זוהה כיוון הטיל .
לאחר מכאן נשלחו מהקוד ,בעזרת משדר רדיו ,פקודות לטיל לנוע אל עבר המטרה.
בקישור הבא סרטון המדגים את המערכת
http://www.youtube.com/watch?v=5htI0zgip3U
אמנון
נערך לאחרונה על ידי אמנון בתאריך ו' מאי 02, 2008 2:08 pm, נערך 3 פעמים בסך הכל.
- אמנון
- רובוטריק
- הודעות: 2031
- הצטרף: ש' יולי 09, 2005 5:41 pm
- מיקום: חיפה
מערכת מיקום בעזרת אבוקות
![]() על ידי אמנון » ו' מאי 02, 2008 12:43 pm
על ידי אמנון » ו' מאי 02, 2008 12:43 pm
PinPointRCX
הוא פרויקט קטן שעשית בעבר (2006) עבור קורס של דר' ראובן גרנות בטכניון.
בפרויקט מומשה מערכת מיקום בעזרת אבוקות , וטראנגולציה (שאילו קללות גדולות למציאת זוויות בין שלושה פנסים המוצבים על הקרקע).

הפרויקט מומש על גבי LEGO MINDESTORM בעזרת קוד ב C.
הפלטפורמה שבנית הייתה מצוידת בגלגלי omnidirectional , דבר שפישט מאוד את כיוון הפלטפורמה.
פרטים נוספים כולל הסברים מפורטים ניתן למצוא בספר הפרויקט הקישור הבא :
http://math.haifa.ac.il/robotics/Projec ... Report.pdf
וכן סרטון המדגים את הפלטפורמה נע מנקודה לא ידוע לנקודה קבוע המסומנת על הריצפה.
החלק המיסתובב הוא הראש אשר מזהה את הזוויות בין שלושת הפנסים.
http://www.youtube.com/watch?v=KYvJvzoSsps
קישור לאתר ש דר' גרנות ולפרויקטים נוספים שבוצעו עבורו: http://math.haifa.ac.il/robotics/student_projects.html
אמנון
הוא פרויקט קטן שעשית בעבר (2006) עבור קורס של דר' ראובן גרנות בטכניון.
בפרויקט מומשה מערכת מיקום בעזרת אבוקות , וטראנגולציה (שאילו קללות גדולות למציאת זוויות בין שלושה פנסים המוצבים על הקרקע).
הפרויקט מומש על גבי LEGO MINDESTORM בעזרת קוד ב C.
הפלטפורמה שבנית הייתה מצוידת בגלגלי omnidirectional , דבר שפישט מאוד את כיוון הפלטפורמה.
פרטים נוספים כולל הסברים מפורטים ניתן למצוא בספר הפרויקט הקישור הבא :
http://math.haifa.ac.il/robotics/Projec ... Report.pdf
וכן סרטון המדגים את הפלטפורמה נע מנקודה לא ידוע לנקודה קבוע המסומנת על הריצפה.
החלק המיסתובב הוא הראש אשר מזהה את הזוויות בין שלושת הפנסים.
http://www.youtube.com/watch?v=KYvJvzoSsps
קישור לאתר ש דר' גרנות ולפרויקטים נוספים שבוצעו עבורו: http://math.haifa.ac.il/robotics/student_projects.html
אמנון
- אמנון
- רובוטריק
- הודעות: 2031
- הצטרף: ש' יולי 09, 2005 5:41 pm
- מיקום: חיפה
![]() על ידי Mishka » ו' מאי 02, 2008 7:00 pm
על ידי Mishka » ו' מאי 02, 2008 7:00 pm
רעיון נחמד לשירשור, אסמך לקרא על מה שאתם עושים
לי יש כצת בעיה לשטף אתכם, אני לא מצלם כלום, את הרוב אני נוטש באמצע, כי אני מתחיל להשתעמם, והרוב אצלי זה משהוא קטן, שום דבר רציני.
אבל אנשים, שתפו אותנו במה שאתם עושים!
גם אם זה רעיון בלבד, שעוד לא התחלתם!
מיכאל
לי יש כצת בעיה לשטף אתכם, אני לא מצלם כלום, את הרוב אני נוטש באמצע, כי אני מתחיל להשתעמם, והרוב אצלי זה משהוא קטן, שום דבר רציני.
אבל אנשים, שתפו אותנו במה שאתם עושים!
גם אם זה רעיון בלבד, שעוד לא התחלתם!
מיכאל
-

Mishka - משתמש ותיק

- הודעות: 349
- הצטרף: ש' יולי 14, 2007 11:45 pm
- מיקום: בת ים
![]() על ידי אמנון » ש' מאי 03, 2008 11:37 pm
על ידי אמנון » ש' מאי 03, 2008 11:37 pm
מיכאל וכולם!
אם אתה לא מצלם אז זה הזמן להתחיל , לא יכול להיות שאף אחד לא צילם שוםפרוייקט עד עכשיו !
גם אם הם פרויקטים קטנים.
אני יכול העלות עוד הרבה פרויקטים , אבל אני מעוניין שגם אחרים ישתפו .
אז אם עשיתם פרויקט בבית ספר, באוניברסיטה, סתם בבית או בעבודה , זה המקום!!
ילה זוזו
אמנון
אם אתה לא מצלם אז זה הזמן להתחיל , לא יכול להיות שאף אחד לא צילם שוםפרוייקט עד עכשיו !
גם אם הם פרויקטים קטנים.
אני יכול העלות עוד הרבה פרויקטים , אבל אני מעוניין שגם אחרים ישתפו .
אז אם עשיתם פרויקט בבית ספר, באוניברסיטה, סתם בבית או בעבודה , זה המקום!!
ילה זוזו
אמנון
- אמנון
- רובוטריק
- הודעות: 2031
- הצטרף: ש' יולי 09, 2005 5:41 pm
- מיקום: חיפה
הפרויקט שלי
![]() על ידי Ngel » א' מאי 04, 2008 8:14 pm
על ידי Ngel » א' מאי 04, 2008 8:14 pm
בקרה על אוטומציה מרוחקת
הפרויקט שלי הוא רובוט שרץ אחרי כדור אינפרא אדום תופס אותו וחוזר לנקודת ההתחלה שלו, תוך כדי האוטומציה מתבצעת בקרה וצפייה על כל הפרמטרים הקשורים לרובוט ע"י מחשב שעליו מותקנת תוכנה שאני פתחתי ואליו ע"י usb מחובר מעגל שכולל בקר ומודל תקשורת אלחוטי מתקדם Xbee שבעזרתו נשלחות ומתקבלות פקודות ופרמטרים מהרובוט.
לצפייה בסרטונים מתוך YouTube:
http://www.youtube.com/watch?v=3D-Kv8bwUHw
http://www.youtube.com/watch?v=zgMW8mL7C00
http://www.youtube.com/watch?v=LbwEKtA4Vww
הפרויקט שלי הוא רובוט שרץ אחרי כדור אינפרא אדום תופס אותו וחוזר לנקודת ההתחלה שלו, תוך כדי האוטומציה מתבצעת בקרה וצפייה על כל הפרמטרים הקשורים לרובוט ע"י מחשב שעליו מותקנת תוכנה שאני פתחתי ואליו ע"י usb מחובר מעגל שכולל בקר ומודל תקשורת אלחוטי מתקדם Xbee שבעזרתו נשלחות ומתקבלות פקודות ופרמטרים מהרובוט.
לצפייה בסרטונים מתוך YouTube:
http://www.youtube.com/watch?v=3D-Kv8bwUHw
http://www.youtube.com/watch?v=zgMW8mL7C00
http://www.youtube.com/watch?v=LbwEKtA4Vww
- Ngel
- משתמש ותיק
- הודעות: 310
- הצטרף: א' פברואר 04, 2007 6:47 pm
כיסא גלגלים נהוג דיבור
![]() על ידי אמנון » ג' מאי 13, 2008 3:45 pm
על ידי אמנון » ג' מאי 13, 2008 3:45 pm
כיסא גלגלים חשמלי נהוג דיבור
הפרויקט בוצע ב 2008 במכללת אורט הרמלין ובשיתוף עם מעבדת הISL בטכניון , ע"י שי , יוסי ורון ובהנחייתי.
תחילה היתמשקו הסטודנטים ליחידת השליטה של כיסא גלגלים חשמלי קיים (ללא מימשק חיבור תיקני) , ובעזרת בקר מסדרת INNOVATION FIRST חוללו מתחים אשר דימו לבקר הכיסא את האותות המיתקבלים מה ג'ויסטיק. הביצוע היה ע"י מימוש DAC בעזרת PWM ו LOWPASS FILTER ,או בעיברית , חילול מתח רציפ בין אפס לחמישה וולט בעזרת יצירת גל ריבועי מהמעבד, והחלקתו ע"י נגד וקבל , פשוט ושווה להכיר!
במקביל חיברו הסטודנטים מערכת מסוג HM2007 שהיא מערכת לזיהוי דיבור זולה אל בקר ה INNOVATION FIRST ולמדו כיצד לדגום אותות מה HM2007 בעזרת ה FIRST.
בנוסף הותקנו על הכיסא 12 חיישנים אשר אמורים לדגום את הסביבה : לזהות מדרגות , שיפועים חדים במיוחד וקירות , וכן מערכת משוב קולית (טקסט לדיבור) אשר מאפשרת לכיסא לתת מענה בדיבור למשתמש.
בשלב האחרון בוצע אינטגרציית חומרה של המערכת מיבחינה חשמלית ומכאנית , וכן כתיבת קוד לקריאת החיישנים קבלת הפקודות מה HM2007 וחילול המתחים המתאימים לכיסא ע"פ כל הקלטים שהתקבלו.

בתמונה הכיסא פועל באופן מלא על פי פקודות דיבור בלבד.
כתבה בנושא:
http://www.ynet.co.il/articles/0,7340,L-3543902,00.html
http://www.mb1.co.il/article.asp?num=10771
סרטון של הכסא בפעולה
http://www.youtube.com/watch?v=ZDvF975JVMQ
אמנון דמרי
הפרויקט בוצע ב 2008 במכללת אורט הרמלין ובשיתוף עם מעבדת הISL בטכניון , ע"י שי , יוסי ורון ובהנחייתי.
תחילה היתמשקו הסטודנטים ליחידת השליטה של כיסא גלגלים חשמלי קיים (ללא מימשק חיבור תיקני) , ובעזרת בקר מסדרת INNOVATION FIRST חוללו מתחים אשר דימו לבקר הכיסא את האותות המיתקבלים מה ג'ויסטיק. הביצוע היה ע"י מימוש DAC בעזרת PWM ו LOWPASS FILTER ,או בעיברית , חילול מתח רציפ בין אפס לחמישה וולט בעזרת יצירת גל ריבועי מהמעבד, והחלקתו ע"י נגד וקבל , פשוט ושווה להכיר!
במקביל חיברו הסטודנטים מערכת מסוג HM2007 שהיא מערכת לזיהוי דיבור זולה אל בקר ה INNOVATION FIRST ולמדו כיצד לדגום אותות מה HM2007 בעזרת ה FIRST.
בנוסף הותקנו על הכיסא 12 חיישנים אשר אמורים לדגום את הסביבה : לזהות מדרגות , שיפועים חדים במיוחד וקירות , וכן מערכת משוב קולית (טקסט לדיבור) אשר מאפשרת לכיסא לתת מענה בדיבור למשתמש.
בשלב האחרון בוצע אינטגרציית חומרה של המערכת מיבחינה חשמלית ומכאנית , וכן כתיבת קוד לקריאת החיישנים קבלת הפקודות מה HM2007 וחילול המתחים המתאימים לכיסא ע"פ כל הקלטים שהתקבלו.
בתמונה הכיסא פועל באופן מלא על פי פקודות דיבור בלבד.
כתבה בנושא:
http://www.ynet.co.il/articles/0,7340,L-3543902,00.html
http://www.mb1.co.il/article.asp?num=10771
סרטון של הכסא בפעולה
http://www.youtube.com/watch?v=ZDvF975JVMQ
אמנון דמרי
- אמנון
- רובוטריק
- הודעות: 2031
- הצטרף: ש' יולי 09, 2005 5:41 pm
- מיקום: חיפה
נחיל רובוטים - מונחיי עכברים אופטיים
![]() על ידי אמנון » ו' פברואר 06, 2009 11:39 am
על ידי אמנון » ו' פברואר 06, 2009 11:39 am
פרויקט נחיל רובוטים מונחי עכברים אופטיים
הפרויקט בוצע על ידי בשנת 2006 במעבדה לרובוטיקה בפקולטה להנדסת תעשיה וניהול בטכניון.

הפרויקט היה פיתוח מלא מרמת הרעיון ,דרך החומרה והתוכנה של פלטפורמות המיועדות למחקר נחילם רובוטים לסטודנטים שהם לא מאוד טכנולוגיים.
הפלטפורמות פועלות בשלוש היררכיות :
ההיררכיה הנמוכה- שליטה בחומרת הרובוט בוצע בעזרת בקר PIC 16F877 אשר הקוד עליו קורא זוג עכברים אופטיים ומנתח את תזוזת הרובוט. כמו כן הבקר קרא מידע מ 6 חישני IR ו4 פגושים. החיישן נישלט בעזרת פרוטוקל יעודי דרך חיבור RS232.
סרטון של ההררכיה הנמוכה בעבודה:
http://www.youtube.com/watch?v=_dBV5sSMCis
היררכית הבייניים - שליטה בהתנהגות הרובוט וקבלת החלטות מקומית מבוצעת בעזרת מחשב כף יד אשר מחובר כלפי מטה אל בקר הרובוט בעזרת יציאת RS232 ואל רובוטים מקבילים ואל ההיררכיה מעל בעזרת חיבור WIFI . מכשיר ה PDA תוכנת בעזרת VISUAL BASIC בכדי לאפשר שליטה נוחה לסטודנטים שאינם טכנולוגים.
סרטון של הפלטפורמה בשליטתה הPDA -
http://www.youtube.com/watch?v=ZSQRYJz6RBY
ההירריכיה הגבוהה - מחשב PC חיצוני אשר יכול לשלוט בכל הפלטפורמות בזירה ולשמש כמתאם בניהן ובינן אל העולם החיצוני (לדוגמא רובוטים אחרים שאינן בנחיל או תכנות העגינה) גם כאן הקוד ניכתב ב VISUAL BASIC .
חלק זה אחראי אל אסטרטגית המשימה כאשר מדובר במשימות מרובוט רובוטים , במצב של עבודת נחיל (שהמשימה ידוע לכל רובוט ברמת ההיררכיה הבינונית) ההיררכיה הגבוהה יכול לשמש כממסר או לא לפעול בכלל.
סרטון של זוג פלטפורמות הנשלטות ביחד מההיררכיה הגבוה. ניתן ליראות שהשליטה היא על כל אחת מהפלטפורמות בנפרד . השליטה היא ברמת ההתנהגות הרצויה ולא שליטה ישירה בחומרה.
http://www.youtube.com/watch?v=dsAOX7nY ... annel_page
בסירטון הבא ניתן ליראות את חלקי הפלטפורמה מקרוב :
http://www.youtube.com/watch?v=yCEJRxcd ... annel_page
ROBOT SWARM optical mouse robot
אמנון דמרי
הפרויקט בוצע על ידי בשנת 2006 במעבדה לרובוטיקה בפקולטה להנדסת תעשיה וניהול בטכניון.
הפרויקט היה פיתוח מלא מרמת הרעיון ,דרך החומרה והתוכנה של פלטפורמות המיועדות למחקר נחילם רובוטים לסטודנטים שהם לא מאוד טכנולוגיים.
הפלטפורמות פועלות בשלוש היררכיות :
ההיררכיה הנמוכה- שליטה בחומרת הרובוט בוצע בעזרת בקר PIC 16F877 אשר הקוד עליו קורא זוג עכברים אופטיים ומנתח את תזוזת הרובוט. כמו כן הבקר קרא מידע מ 6 חישני IR ו4 פגושים. החיישן נישלט בעזרת פרוטוקל יעודי דרך חיבור RS232.
סרטון של ההררכיה הנמוכה בעבודה:
http://www.youtube.com/watch?v=_dBV5sSMCis
היררכית הבייניים - שליטה בהתנהגות הרובוט וקבלת החלטות מקומית מבוצעת בעזרת מחשב כף יד אשר מחובר כלפי מטה אל בקר הרובוט בעזרת יציאת RS232 ואל רובוטים מקבילים ואל ההיררכיה מעל בעזרת חיבור WIFI . מכשיר ה PDA תוכנת בעזרת VISUAL BASIC בכדי לאפשר שליטה נוחה לסטודנטים שאינם טכנולוגים.
סרטון של הפלטפורמה בשליטתה הPDA -
http://www.youtube.com/watch?v=ZSQRYJz6RBY
ההירריכיה הגבוהה - מחשב PC חיצוני אשר יכול לשלוט בכל הפלטפורמות בזירה ולשמש כמתאם בניהן ובינן אל העולם החיצוני (לדוגמא רובוטים אחרים שאינן בנחיל או תכנות העגינה) גם כאן הקוד ניכתב ב VISUAL BASIC .
חלק זה אחראי אל אסטרטגית המשימה כאשר מדובר במשימות מרובוט רובוטים , במצב של עבודת נחיל (שהמשימה ידוע לכל רובוט ברמת ההיררכיה הבינונית) ההיררכיה הגבוהה יכול לשמש כממסר או לא לפעול בכלל.
סרטון של זוג פלטפורמות הנשלטות ביחד מההיררכיה הגבוה. ניתן ליראות שהשליטה היא על כל אחת מהפלטפורמות בנפרד . השליטה היא ברמת ההתנהגות הרצויה ולא שליטה ישירה בחומרה.
http://www.youtube.com/watch?v=dsAOX7nY ... annel_page
בסירטון הבא ניתן ליראות את חלקי הפלטפורמה מקרוב :
http://www.youtube.com/watch?v=yCEJRxcd ... annel_page
ROBOT SWARM optical mouse robot
אמנון דמרי
- אמנון
- רובוטריק
- הודעות: 2031
- הצטרף: ש' יולי 09, 2005 5:41 pm
- מיקום: חיפה
פח זבל נישלט דיבור
![]() על ידי אמנון » ש' אפריל 04, 2009 12:45 pm
על ידי אמנון » ש' אפריל 04, 2009 12:45 pm
פח זבל נישלט דיבור
הדרך האידיוטית והיקרה ביותר להזיז פח זבל!

סירטון :
http://www.youtube.com/watch?v=--BIlxKVCYk
פרויקט של 4 ימי עבודה. לטובת כנס בשם "כינרנט".
דרישות הפרויקט שיהיה פסכי עד כמה שניתן , ועדיף שיהיה לא שימושי.
הרעיון בניית פלטפורמה שעליה ישב פח זבל , שיבוא כאשר קוראים לו ויחזור למקום בפקודת דיבור.
הפלטפורמה מבוססת על 3 גלגלי OMNIDIRECTIONAL המחוברים למנועי מברגות עם קלאצ' נעול , ולשלושה בקרי מנוע מסוג L298
סוללת של המברגות עם התושבת שלהן כמקור מתח.
5 חישני קו .
מערכת זיהוי דיבור מסוג HM2007 , עם מיקרופון של דיבורית רכב.
לוח אולימקס עם בקר PIC18F4431.
תמונה של המערכת :

תמונה עם הסברים ניתן לימצוא כאן :
http://www.flickr.com/photos/26209977@N ... otostream/
בשלב זה כאשר אומרים בסביבת המערכת את המילים "פח זבל " והלדים נידלקים והמערכת מצפה למילה הבאה.
במידה והמילה הבאה היא "אלי" המערכת נעה קדימה על הקו השחור עד ההצתלבות הראשונה. במידה והמילה הייתה "חזרה" המערכת נעה אחורה על הקו השחור עד ההצתלבות הראשונה.
בשלב הבא יוחלפו החיישנים על המערכת לחיישני UV בכדי שניתן יהיה לנוע על קו בצבע UV שאינו ניראה לעין.
כמו כן המערכת תתלבש על תחנת עגינה לטעינה עצמאית , וכן תדע לזהות עוד מספר פקודות להגעה אל דלת הכניסה כדי "ליזרוק את הזבל".
אמנון
הדרך האידיוטית והיקרה ביותר להזיז פח זבל!
סירטון :
http://www.youtube.com/watch?v=--BIlxKVCYk
פרויקט של 4 ימי עבודה. לטובת כנס בשם "כינרנט".
דרישות הפרויקט שיהיה פסכי עד כמה שניתן , ועדיף שיהיה לא שימושי.
הרעיון בניית פלטפורמה שעליה ישב פח זבל , שיבוא כאשר קוראים לו ויחזור למקום בפקודת דיבור.
הפלטפורמה מבוססת על 3 גלגלי OMNIDIRECTIONAL המחוברים למנועי מברגות עם קלאצ' נעול , ולשלושה בקרי מנוע מסוג L298
סוללת של המברגות עם התושבת שלהן כמקור מתח.
5 חישני קו .
מערכת זיהוי דיבור מסוג HM2007 , עם מיקרופון של דיבורית רכב.
לוח אולימקס עם בקר PIC18F4431.
תמונה של המערכת :
תמונה עם הסברים ניתן לימצוא כאן :
http://www.flickr.com/photos/26209977@N ... otostream/
בשלב זה כאשר אומרים בסביבת המערכת את המילים "פח זבל " והלדים נידלקים והמערכת מצפה למילה הבאה.
במידה והמילה הבאה היא "אלי" המערכת נעה קדימה על הקו השחור עד ההצתלבות הראשונה. במידה והמילה הייתה "חזרה" המערכת נעה אחורה על הקו השחור עד ההצתלבות הראשונה.
בשלב הבא יוחלפו החיישנים על המערכת לחיישני UV בכדי שניתן יהיה לנוע על קו בצבע UV שאינו ניראה לעין.
כמו כן המערכת תתלבש על תחנת עגינה לטעינה עצמאית , וכן תדע לזהות עוד מספר פקודות להגעה אל דלת הכניסה כדי "ליזרוק את הזבל".
אמנון
- אמנון
- רובוטריק
- הודעות: 2031
- הצטרף: ש' יולי 09, 2005 5:41 pm
- מיקום: חיפה
מערכת תקשורת בעזרת האישון וטרקטורון מונחה ה GPS
![]() על ידי אמנון » ד' אפריל 29, 2009 10:27 pm
על ידי אמנון » ד' אפריל 29, 2009 10:27 pm
הי לכם
שנים משלושת הפרויקטים שהנחתי באורט הרמלין נתניה עד השבוע שעבר:
מערכת תקשורת בעזרת האישון לחולי ALS (בביצוע יואב,אורן וחיים)

http://www.youtube.com/watch?v=l8G6odSF ... annel_page
טרקטורון מונחה ה GPS (בביצוע יניב ודני)

http://www.youtube.com/watch?v=wV0usfx32i4
טיל שגר ושכח (בביצוע שאול ,נתיב ונריה)
http://www.youtube.com/watch?v=t_c1WXn9Ywo
תיעוד מסודר יותר יעלה לרשת בקרוב.
אמנון
שנים משלושת הפרויקטים שהנחתי באורט הרמלין נתניה עד השבוע שעבר:
מערכת תקשורת בעזרת האישון לחולי ALS (בביצוע יואב,אורן וחיים)
http://www.youtube.com/watch?v=l8G6odSF ... annel_page
טרקטורון מונחה ה GPS (בביצוע יניב ודני)
http://www.youtube.com/watch?v=wV0usfx32i4
טיל שגר ושכח (בביצוע שאול ,נתיב ונריה)
http://www.youtube.com/watch?v=t_c1WXn9Ywo
תיעוד מסודר יותר יעלה לרשת בקרוב.
אמנון
נערך לאחרונה על ידי אמנון בתאריך ה' אוקטובר 01, 2009 12:04 am, נערך פעם אחת בסך הכל.
- אמנון
- רובוטריק
- הודעות: 2031
- הצטרף: ש' יולי 09, 2005 5:41 pm
- מיקום: חיפה
פרד פנאומטי
![]() על ידי אמנון » ג' יולי 07, 2009 7:30 am
על ידי אמנון » ג' יולי 07, 2009 7:30 am
פרד פנאומטי
פלטפורמה פנאומטית הולכת
באוניברסיטת בן גוריון
פרוייקט בתהליך
תעוד מסודר יעלה בקרוב

http://www.youtube.com/watch?v=t5nBKOageVo
http://www.youtube.com/watch?v=OWGudAfp ... re=related
צוות :
פלטפורמה פנאומטית הולכת
באוניברסיטת בן גוריון
פרוייקט בתהליך
תעוד מסודר יעלה בקרוב
http://www.youtube.com/watch?v=t5nBKOageVo
http://www.youtube.com/watch?v=OWGudAfp ... re=related
צוות :
- דר' אמיר שפירא
דר' רזיאל רימר
צבי קורצקי
לירן גולן
אמנון דמרי
נערך לאחרונה על ידי אמנון בתאריך ה' אוקטובר 01, 2009 12:06 am, נערך 2 פעמים בסך הכל.
- אמנון
- רובוטריק
- הודעות: 2031
- הצטרף: ש' יולי 09, 2005 5:41 pm
- מיקום: חיפה
![]() על ידי אמנון » ה' יולי 09, 2009 5:02 pm
על ידי אמנון » ה' יולי 09, 2009 5:02 pm
מרסס תמרים בראיה ממוחשבת
פרויקט בתהליך , מערכת רובוטית לריסוס תמרים במטע מונחית מצלמה וראיה ממוחשבת. אוניברסיטת בן גוריון.
בשלב ראשון המערכת אמורה לרסס עצי תמר בעזרת סמנים אשר מותקנים על גזע העץ , בשלב הבא הריסוס יבוצע ע"י זיהוי העץ ואזורי התמרים ללא סמנים .
טיפול במספר מטרות במקביל
http://www.youtube.com/watch?v=1vvO5cHub28
ניסוי אב טיפוס ראשון :
http://www.youtube.com/watch?v=jh_-LF5mCP4
אותו הניסוי מיתוך הרובוט :
http://www.youtube.com/watch?v=y4-9x0MFgV8
הדגמת ריסוס באב הטיפוס:
http://www.youtube.com/watch?v=7Gq_qmMkZdk
ניסוי ראשון במטע על גבי מרסס בגודל מלא:
http://www.youtube.com/watch?v=aqGPXw7X ... re=related
http://www.youtube.com/watch?v=7VMt9zO3 ... re=related
מידע מפורט בהמשך .
צוות :
פרויקט בתהליך , מערכת רובוטית לריסוס תמרים במטע מונחית מצלמה וראיה ממוחשבת. אוניברסיטת בן גוריון.
בשלב ראשון המערכת אמורה לרסס עצי תמר בעזרת סמנים אשר מותקנים על גזע העץ , בשלב הבא הריסוס יבוצע ע"י זיהוי העץ ואזורי התמרים ללא סמנים .
טיפול במספר מטרות במקביל
http://www.youtube.com/watch?v=1vvO5cHub28
ניסוי אב טיפוס ראשון :
http://www.youtube.com/watch?v=jh_-LF5mCP4
אותו הניסוי מיתוך הרובוט :
http://www.youtube.com/watch?v=y4-9x0MFgV8
הדגמת ריסוס באב הטיפוס:
http://www.youtube.com/watch?v=7Gq_qmMkZdk
ניסוי ראשון במטע על גבי מרסס בגודל מלא:
http://www.youtube.com/watch?v=aqGPXw7X ... re=related
http://www.youtube.com/watch?v=7VMt9zO3 ... re=related
מידע מפורט בהמשך .
צוות :
- פרופסור יעל אידן
דר' אוהד בן שחר
דר' רזיאל רימר
דר' אמיר שפירא
ערן קורקידי
אמנון דמרי
נערך לאחרונה על ידי אמנון בתאריך ג' אוגוסט 18, 2009 8:18 am, נערך פעם אחת בסך הכל.
- אמנון
- רובוטריק
- הודעות: 2031
- הצטרף: ש' יולי 09, 2005 5:41 pm
- מיקום: חיפה
![]() על ידי iii » ו' יולי 10, 2009 8:26 am
על ידי iii » ו' יולי 10, 2009 8:26 am
פרוייקט שעשינו לפני כשנה וחצי במעבדה לבקרה ורובוטיקה בפקולטה להנדסת חשמל בטכניון בהנחיית קובי כוחי.
הפרוייקט היה לבנות רובוט שמנקה חלונות. מפה לשם הפרוייקט התארך והסתפקנו רק בטיפוס ללא ניקוי.
הרובוט פועל על עקרון ואקום ומצוייד בשני מנועי סרוו ומנוע DC דיי הרבה חיישני מגע ושני חיישני מרחק.
הפרוייקט התחיל מאפס ולאורך הזמן פרקנו והוספנו דברים עד שהגענו לצורתו הסופית (לקח לנו בערך כשנה) ובסיומו הרובוט הלך על כל משטח מאונך ולא רק על חלונות.
http://webee.technion.ac.il/control/inf ... otgood.wmv
היה פרוייקט כיפי ונהננו.
הפרוייקט היה לבנות רובוט שמנקה חלונות. מפה לשם הפרוייקט התארך והסתפקנו רק בטיפוס ללא ניקוי.
הרובוט פועל על עקרון ואקום ומצוייד בשני מנועי סרוו ומנוע DC דיי הרבה חיישני מגע ושני חיישני מרחק.
הפרוייקט התחיל מאפס ולאורך הזמן פרקנו והוספנו דברים עד שהגענו לצורתו הסופית (לקח לנו בערך כשנה) ובסיומו הרובוט הלך על כל משטח מאונך ולא רק על חלונות.
http://webee.technion.ac.il/control/inf ... otgood.wmv
היה פרוייקט כיפי ונהננו.
- iii
- חבר פורום

- הודעות: 73
- הצטרף: ה' נובמבר 30, 2006 5:49 pm
![]() על ידי belov » ב' אוגוסט 17, 2009 8:56 pm
על ידי belov » ב' אוגוסט 17, 2009 8:56 pm
This Robot follows along the edge of a table without falling off. Robot uses LDR sensors to detect the edge of a table, Uses Hitec HS-311 modified 360 degree servo motors & AVR atmega168 MCU.
משהו שעשיתי כי סתם היה משעמם..לדעתי יצא חמוד..
המטרה של הרובוט לא ליפול מהשולחן.



http://www.youtube.com/watch?v=EAhnqiOWIDM
יורי בלוב.
משהו שעשיתי כי סתם היה משעמם..לדעתי יצא חמוד..
המטרה של הרובוט לא ליפול מהשולחן.



http://www.youtube.com/watch?v=EAhnqiOWIDM
יורי בלוב.
- belov
- חבר פורום
- הודעות: 54
- הצטרף: ד' ינואר 14, 2009 5:15 pm
![]() על ידי אמנון » ו' אוקטובר 16, 2009 6:06 pm
על ידי אמנון » ו' אוקטובר 16, 2009 6:06 pm
דג רובוטי
דג רובוטי שניבנה לאיזה כנס .

הדג בנוי מפולי קרבונט ודלרין.
הדג מכיל שלושה מנועי סרבו שטופלו לעמידות במים.
בקר PIC 16F877A ששולט במערכת וחיבור ל שלושה חישני מרחק לזיהוי מכשולים (שלא מופעלים בשלב הזה).
כל הסיפור ניבנה בפועל ב כ 20 שעות שכ 30 מיתוכן (כן 30 מ 20) היו לטיפול באטימה של המעגל שהיה מאוד בעד מים (ואני רציתי אותו נגד מים) .
ניסיון ראשון היה ציפוי בלקה - לא עבד.
ניסיון שני הטבלה בדבק חם - לא עבד.
ניסיון שלישי התבעה באפוקסי - עבד.
הקוד בשלב הזה מבוסס רק על פיגור פזה אפילו ללא גל סינונס מסודר (היתכוונתי לשדרג ולהכניס טבלת סינונס אבל הכל ניתבל באפוקסי ובזה זה היסתיים.
הכוונה הייתה לחישן את הסביבה ולזהות מיכשולים וגם לרדוף אחרי מקור אור מהבהב,שישמש כפיתיון לחכה מגנטית.
סרטונים:
הדג מחוץ למים - http://www.youtube.com/watch?v=haJMsdAec6U
הדג מיתחת למים - http://www.youtube.com/watch?v=TJ092I0Y ... r_embedded
הדג במים עם "תיק גב" ומצופים כי הוא לומד לישחות - http://www.youtube.com/watch?v=c_LgV6jP_7g
אמנון
דג רובוטי שניבנה לאיזה כנס .
הדג בנוי מפולי קרבונט ודלרין.
הדג מכיל שלושה מנועי סרבו שטופלו לעמידות במים.
בקר PIC 16F877A ששולט במערכת וחיבור ל שלושה חישני מרחק לזיהוי מכשולים (שלא מופעלים בשלב הזה).
כל הסיפור ניבנה בפועל ב כ 20 שעות שכ 30 מיתוכן (כן 30 מ 20) היו לטיפול באטימה של המעגל שהיה מאוד בעד מים (ואני רציתי אותו נגד מים) .
ניסיון ראשון היה ציפוי בלקה - לא עבד.
ניסיון שני הטבלה בדבק חם - לא עבד.
ניסיון שלישי התבעה באפוקסי - עבד.
הקוד בשלב הזה מבוסס רק על פיגור פזה אפילו ללא גל סינונס מסודר (היתכוונתי לשדרג ולהכניס טבלת סינונס אבל הכל ניתבל באפוקסי ובזה זה היסתיים.
הכוונה הייתה לחישן את הסביבה ולזהות מיכשולים וגם לרדוף אחרי מקור אור מהבהב,שישמש כפיתיון לחכה מגנטית.
סרטונים:
הדג מחוץ למים - http://www.youtube.com/watch?v=haJMsdAec6U
הדג מיתחת למים - http://www.youtube.com/watch?v=TJ092I0Y ... r_embedded
הדג במים עם "תיק גב" ומצופים כי הוא לומד לישחות - http://www.youtube.com/watch?v=c_LgV6jP_7g
אמנון
- אמנון
- רובוטריק
- הודעות: 2031
- הצטרף: ש' יולי 09, 2005 5:41 pm
- מיקום: חיפה
54 הודעות
• עמוד 1 מתוך 4 • 1, 2, 3, 4
מי מחובר
משתמשים הגולשים בפורום זה: Google [Bot], xalmek ו 27 אורחים