שלום,
שמי יעל ואני העורכת הראשית של ערוץ וידאו בשם קריקטור שמסקר את ההתרחשות הטכנולוגית בישראל. לפני חודש פתחנו פרויקט חדש שנקרא - Hack. הפרויקט מיועד לכל מי שעושה פרויקטים בתחום האלקטרוניקה. אנחנו מזמינים אתכם לשלוח אלינו סירטון קצר של הפרויקט. כולל הסבר כתוב עם תמונות או שירטוטים וכל מה שלדעתכם צריך כדי לבנות פרויקט דומה לשלכם ואנחנו נעלה את התוכן לקריקטור. המטרה היא ליצור מאגר ידע חופשי בעברית ולהנות מכמה פרויקטים מצוינים.
הכתובת למשלוח היא: editor@crictor.co.il
באתר של קריקטור תוכלו למצוא גם סירטון קצר שמספר מה זה Hack ולצידו יש קישורים ל-6
פרויקטים של ענבר חובב: http://www.crictor.co.il/he/
להתראות ותודה על הבמה,
יעל
שירשור פרויקטים
הזמנה להשתתף בפרויקט ה- Hack של קריקטור
![]() על ידי יעל » ג' דצמבר 22, 2009 2:58 pm
על ידי יעל » ג' דצמבר 22, 2009 2:58 pm
- יעל
- משתמש חדש

- הודעות: 1
- הצטרף: ג' דצמבר 22, 2009 1:57 pm
- מיקום: Israel
![]() על ידי nivini » ש' ינואר 23, 2010 6:21 pm
על ידי nivini » ש' ינואר 23, 2010 6:21 pm
מבוך עץ - מנועי סרבו - ATmega32
נבנה בינואר 2010
כרגע, שלוש אפשרויות לשליטה במשחק:
1. משחק עצמאי לפי פקודות שתכנתתי מראש (סדרת פקודות ברצף של זמן).
לפעמים הכדור מצליח לעבור את המכשולים ולפעמים לא.
הבעיה כאן היא המכניקה הנמוכה של המבוך (חוטים וקפיצים) כך שהוא יוצא מכיונון ובנוסף כמה גורמים פיסיקליים.
2. מקשי החצים של מקלדת המחשב דרך RS-232. עדיין לא עובד מאה אחוז ב-BAUD גבוה מ-9600 (בבדיקה).
3. ארבעה מתגים שהוצאתי מג'ויסטיק מחוברים ישירות למיקרוקונטרולר. עובד מעולה.
הסבר מפורט נמצא כאן:
http://www.instructables.com/id/Servo-Controlled-Labyrinth/
סרטון הדגמה:
http://www.youtube.com/watch?v=qWtv9rEl-ew

נבנה בינואר 2010
כרגע, שלוש אפשרויות לשליטה במשחק:
1. משחק עצמאי לפי פקודות שתכנתתי מראש (סדרת פקודות ברצף של זמן).
לפעמים הכדור מצליח לעבור את המכשולים ולפעמים לא.
הבעיה כאן היא המכניקה הנמוכה של המבוך (חוטים וקפיצים) כך שהוא יוצא מכיונון ובנוסף כמה גורמים פיסיקליים.
2. מקשי החצים של מקלדת המחשב דרך RS-232. עדיין לא עובד מאה אחוז ב-BAUD גבוה מ-9600 (בבדיקה).
3. ארבעה מתגים שהוצאתי מג'ויסטיק מחוברים ישירות למיקרוקונטרולר. עובד מעולה.
הסבר מפורט נמצא כאן:
http://www.instructables.com/id/Servo-Controlled-Labyrinth/
סרטון הדגמה:
http://www.youtube.com/watch?v=qWtv9rEl-ew
- nivini
- משתמש חדש
- הודעות: 12
- הצטרף: ו' ינואר 22, 2010 8:15 am
- מיקום: somewhere over the rainbow
![]() על ידי אמנון » א' מאי 02, 2010 10:56 pm
על ידי אמנון » א' מאי 02, 2010 10:56 pm
כפפה וירטואלית לזיהוי שפת סימנים

פרויקט שהנחתי באורט הרמלין .
הפרויקט בוצע על ידי סרגי סימנוב בשנת 2009- 2010 .
בפרויקט סרגיי בנה כפפה עם חיישני כפיפה ומדי תאוצה.
הכפפה מחוברת לבקר VEX אשר בעזרת הכניסות האנלוגיות דוגם את חיישני הכפיפה (ודרכם את מצב האצבעות) וכן את מדיי התאוצה .
על פי המידע מהחיישנים התכנית בבקר מזהה שפת סימנים , ומפענחת משפטים אשר מסומנים בעזרת היד אשר הכפפה מולבשת עליה. משפטים אילו משודרים בעזרת גלי רדיו לזוג רובוטים ניידים אשר מקבלים פקודות אישיות ומבצעים אותן.

בסרטון - נהיגה חופשית - הרובוט נע על פי הטיית כף היד
http://www.youtube.com/watch?v=V8L-cnPWrvs
בסרטון - שליחת פקודה בשפת סימנים - הרובוט מקבל פקודת תנוע הכוללת , כיוון זמן ומהירות ומבצע אותה.
http://www.youtube.com/watch?v=QovWGP7sXQI
מידע על חיישני כפיפה :
http://www.imagesco.com/sensors/flex-sensor.html
אמנון
פרויקט שהנחתי באורט הרמלין .
הפרויקט בוצע על ידי סרגי סימנוב בשנת 2009- 2010 .
בפרויקט סרגיי בנה כפפה עם חיישני כפיפה ומדי תאוצה.
הכפפה מחוברת לבקר VEX אשר בעזרת הכניסות האנלוגיות דוגם את חיישני הכפיפה (ודרכם את מצב האצבעות) וכן את מדיי התאוצה .
על פי המידע מהחיישנים התכנית בבקר מזהה שפת סימנים , ומפענחת משפטים אשר מסומנים בעזרת היד אשר הכפפה מולבשת עליה. משפטים אילו משודרים בעזרת גלי רדיו לזוג רובוטים ניידים אשר מקבלים פקודות אישיות ומבצעים אותן.
בסרטון - נהיגה חופשית - הרובוט נע על פי הטיית כף היד
http://www.youtube.com/watch?v=V8L-cnPWrvs
בסרטון - שליחת פקודה בשפת סימנים - הרובוט מקבל פקודת תנוע הכוללת , כיוון זמן ומהירות ומבצע אותה.
http://www.youtube.com/watch?v=QovWGP7sXQI
מידע על חיישני כפיפה :
http://www.imagesco.com/sensors/flex-sensor.html
אמנון
- אמנון
- רובוטריק

- הודעות: 2031
- הצטרף: ש' יולי 09, 2005 5:41 pm
- מיקום: חיפה
![]() על ידי אמנון » ב' מאי 03, 2010 1:08 am
על ידי אמנון » ב' מאי 03, 2010 1:08 am
זרוע תותבת מופעלת EMG

פרויקט גמר לתעודת הנדסאי מכטרוניקה של ג'ואן סבג , טל חננאל וגיא שחר במכללת אורט הרמלין , נתניה . בשנת 2010 , הפרויקט בוצע בהנחייתי .
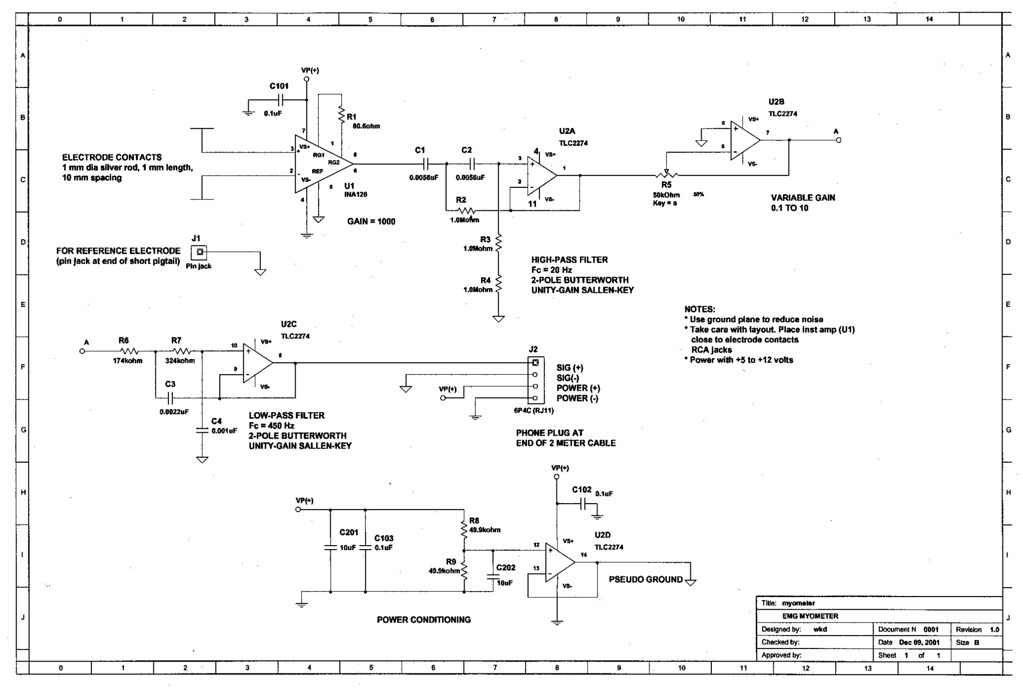
זרוע תותבת המופעלת בעזרת EMG(אלקטרומיוגרם - מתחים זעירים הנוצרים בשרירים בזמן כיווץ השריר) . הזרוע מיועדת לקטועי יד מתחת למרפק. בעזרת 8 אלקטרודות באזורים שונים על גוף המשתמש , אנו דוגמים כיווצי שרירים שהמשתמש מפעיל . ועל פי הכיווצים השונים הזרוע מבצעת פעולות של פתיחת או סגירת כף היד וכן סבסוב כף היד. הזרוע תוכננה להיות במשקל זרוע אדם רגילה. היא מופעלת בעזרת זוג מנועי סרבו , ובקר PIC 16f877A .
בזרוע ישנם שני חוגי בקרה:

בסרטון - הפעלת המערכת במצבים שונים :
http://www.youtube.com/watch?v=3aOCFlLbcnY
בסירטון- הפעלה ראשונה של המערכת עם EMG
http://www.youtube.com/watch?v=SPYxc3XsDCQ
מידע וחלקים :
האלקטרודות הן מסוג Silver/silver chloride , ניתן לירכוש אותן במספר מקומות כולל : http://www.electrodestore.com/
השתמשנו במעגל הגבר ופילטרים :
http://farm5.static.flickr.com/4007/458 ... f065_b.jpg
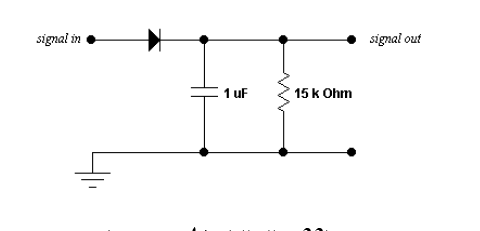
וכן במעגל החלקה שאפשר הכנסת נתוני AC לכניסת ה ADC של ה PIC
http://farm5.static.flickr.com/4044/458 ... 6742_o.png
אמנון
פרויקט גמר לתעודת הנדסאי מכטרוניקה של ג'ואן סבג , טל חננאל וגיא שחר במכללת אורט הרמלין , נתניה . בשנת 2010 , הפרויקט בוצע בהנחייתי .
זרוע תותבת המופעלת בעזרת EMG(אלקטרומיוגרם - מתחים זעירים הנוצרים בשרירים בזמן כיווץ השריר) . הזרוע מיועדת לקטועי יד מתחת למרפק. בעזרת 8 אלקטרודות באזורים שונים על גוף המשתמש , אנו דוגמים כיווצי שרירים שהמשתמש מפעיל . ועל פי הכיווצים השונים הזרוע מבצעת פעולות של פתיחת או סגירת כף היד וכן סבסוב כף היד. הזרוע תוכננה להיות במשקל זרוע אדם רגילה. היא מופעלת בעזרת זוג מנועי סרבו , ובקר PIC 16f877A .
בזרוע ישנם שני חוגי בקרה:
- אחד למשתמש - מנוע רטט אשר נותן חיווי למשתמש על עוצמת הלחיצה של האצבעות.
חוג בקרה שני עבור המערכת - בעזרת חיישני זרם אנו מבקרים את הכוח שמפעילים המנועים כך
בסרטון - הפעלת המערכת במצבים שונים :
http://www.youtube.com/watch?v=3aOCFlLbcnY
בסירטון- הפעלה ראשונה של המערכת עם EMG
http://www.youtube.com/watch?v=SPYxc3XsDCQ
מידע וחלקים :
האלקטרודות הן מסוג Silver/silver chloride , ניתן לירכוש אותן במספר מקומות כולל : http://www.electrodestore.com/
השתמשנו במעגל הגבר ופילטרים :
http://farm5.static.flickr.com/4007/458 ... f065_b.jpg
{kind=link}
וכן במעגל החלקה שאפשר הכנסת נתוני AC לכניסת ה ADC של ה PIC
http://farm5.static.flickr.com/4044/458 ... 6742_o.png
{kind=link}
אמנון
נערך לאחרונה על ידי אמנון בתאריך ד' מאי 05, 2010 9:24 am, נערך 2 פעמים בסך הכל.
- אמנון
- רובוטריק
- הודעות: 2031
- הצטרף: ש' יולי 09, 2005 5:41 pm
- מיקום: חיפה
![]() על ידי אמנון » ב' מאי 03, 2010 8:35 am
על ידי אמנון » ב' מאי 03, 2010 8:35 am
טרקטורון מנוהג GPS ומצלמה EMG
פרויקט גמר לתעודת הנדסאי מכטרוניקה של לירון דימה ודביר במכללת אורט הרמלין , נתניה . בשנת 2010 , הפרויקט בוצע בהנחייתי .
הרעיון בפרויקט היה להמשיך את פרויקט "טרקטורון מונחה הGPS " של דני ויניב (פרטים העמוד הקודם) , ולהוסיף למערכת יכולות כניסה למבנה ותנוע בתוך מיבנה. ןכן עמדת שליטה מבוססת WIFI.
מימוש המערכת החלקי כלל:
כניסה למבנה על בסיס חיישנים אולטראסוניים.
תנועה בתוך מיבנה על בסיס VANISHING POINT ואודאומטריה.
בסרטון הבאה ניתן ליראות מימוש ראשוני של הכניסה למבנה (המימוש מאוד מאוד ארוך ולא מוחלט (יותר מדקה להיכנס למבנה)
http://www.youtube.com/watch?v=qXSkFEdB8yg
בסרטון הבא - מימוש ראשוני של אלגוריטם הVANISHING POINT לזיהוי מרכז המיסדרון (המימוש מאוד איטי ולא יעיל , אבל מראה את העיקרון הכללי של המערכת).
http://www.youtube.com/watch?v=bcWCMqefxnY
בסירטון הבא - ניסיון נהיגה ראשוני של הטרקטורון על פי ה VANISHING POINT חוג הבקרה על ההגיוי הוא פרופורציונאלי בלבד ולא מכוון , לכן אנו רואים את תנועות ההגה החדות. הטרקטורון עוצר כאשר המחשב מזהה את הלוח עם המרובעים מולו.
http://www.youtube.com/watch?v=-LcqT8NB9So
הקישורים הועלו למושג כללי ואינם דוגמה למימוש מוצלח!
מערכת עליה ביססנו את ראיון התנוע עם VANISHING POINT
http://www.youtube.com/watch?v=nb0VpSYtJ_Y
אמנון
פרויקט גמר לתעודת הנדסאי מכטרוניקה של לירון דימה ודביר במכללת אורט הרמלין , נתניה . בשנת 2010 , הפרויקט בוצע בהנחייתי .
הרעיון בפרויקט היה להמשיך את פרויקט "טרקטורון מונחה הGPS " של דני ויניב (פרטים העמוד הקודם) , ולהוסיף למערכת יכולות כניסה למבנה ותנוע בתוך מיבנה. ןכן עמדת שליטה מבוססת WIFI.
מימוש המערכת החלקי כלל:
כניסה למבנה על בסיס חיישנים אולטראסוניים.
תנועה בתוך מיבנה על בסיס VANISHING POINT ואודאומטריה.
בסרטון הבאה ניתן ליראות מימוש ראשוני של הכניסה למבנה (המימוש מאוד מאוד ארוך ולא מוחלט (יותר מדקה להיכנס למבנה)
http://www.youtube.com/watch?v=qXSkFEdB8yg
בסרטון הבא - מימוש ראשוני של אלגוריטם הVANISHING POINT לזיהוי מרכז המיסדרון (המימוש מאוד איטי ולא יעיל , אבל מראה את העיקרון הכללי של המערכת).
http://www.youtube.com/watch?v=bcWCMqefxnY
בסירטון הבא - ניסיון נהיגה ראשוני של הטרקטורון על פי ה VANISHING POINT חוג הבקרה על ההגיוי הוא פרופורציונאלי בלבד ולא מכוון , לכן אנו רואים את תנועות ההגה החדות. הטרקטורון עוצר כאשר המחשב מזהה את הלוח עם המרובעים מולו.
http://www.youtube.com/watch?v=-LcqT8NB9So
הקישורים הועלו למושג כללי ואינם דוגמה למימוש מוצלח!
מערכת עליה ביססנו את ראיון התנוע עם VANISHING POINT
http://www.youtube.com/watch?v=nb0VpSYtJ_Y
אמנון
- אמנון
- רובוטריק
- הודעות: 2031
- הצטרף: ש' יולי 09, 2005 5:41 pm
- מיקום: חיפה
![]() על ידי satrug » ב' ספטמבר 06, 2010 9:40 pm
על ידי satrug » ב' ספטמבר 06, 2010 9:40 pm
Technion Hexapod - THEX

אני מניח שרבים מכם מכירים את הRHEX של "בוסטון דיינמיקס"
הפרויקט שלנו נעשה במעבדה לבקרה ורובוטיקה בטכניון בהנחיית קובי כוחיי.
כחלק מלימודינו לתואר ראשון בהנדסת חשמל.
עברנו את כל התהליך של בחירת הרכיבים, הבנייה וכתיבת התוכנה.
התוצאה הסופית לאחר יותר משנה וחצי של עבודה היא ה THEX - Technion Hexapod
הרובוט כולל שישה מנועי DC 12V
שניים עשר חישני פוטו, שניים לכל מנוע על מנת לזהות כיוון התקדמות
על הרובוט ממוקם מצבר שמזין את המנועים וסוללות נוספות עבור הלוגיקה
ששת הרגליים הם חלקים מצינורות PVC מחוזקים על ידי סרגלי פלדה מעוקמים בהזמנה כדי לספק גמישות ויציבות
על הרובוט גם יחידת תקשורת של VEX
התוצאה היא רובוט אוטונומי נשלט מרחוק על ידי שלט רחוק שנמצא בידי המפעיל
הייחודיות של סגנון תנועה זה היא היכולת להתמודד עם מגוון רחב של מכשולים שרובוט על גלגלים יתקשה לעבור
קליפ של הרובוט שלנו:
http://www.youtube.com/watch?v=-1ZNCtcbSow
קליפ של הפונקציונליות של רובוטים מסוג זה:
http://www.youtube.com/watch?v=dilEgVu-6fw
עידן וסטס
אני מניח שרבים מכם מכירים את הRHEX של "בוסטון דיינמיקס"
הפרויקט שלנו נעשה במעבדה לבקרה ורובוטיקה בטכניון בהנחיית קובי כוחיי.
כחלק מלימודינו לתואר ראשון בהנדסת חשמל.
עברנו את כל התהליך של בחירת הרכיבים, הבנייה וכתיבת התוכנה.
התוצאה הסופית לאחר יותר משנה וחצי של עבודה היא ה THEX - Technion Hexapod
הרובוט כולל שישה מנועי DC 12V
שניים עשר חישני פוטו, שניים לכל מנוע על מנת לזהות כיוון התקדמות
על הרובוט ממוקם מצבר שמזין את המנועים וסוללות נוספות עבור הלוגיקה
ששת הרגליים הם חלקים מצינורות PVC מחוזקים על ידי סרגלי פלדה מעוקמים בהזמנה כדי לספק גמישות ויציבות
על הרובוט גם יחידת תקשורת של VEX
התוצאה היא רובוט אוטונומי נשלט מרחוק על ידי שלט רחוק שנמצא בידי המפעיל
הייחודיות של סגנון תנועה זה היא היכולת להתמודד עם מגוון רחב של מכשולים שרובוט על גלגלים יתקשה לעבור
קליפ של הרובוט שלנו:
http://www.youtube.com/watch?v=-1ZNCtcbSow
קליפ של הפונקציונליות של רובוטים מסוג זה:
http://www.youtube.com/watch?v=dilEgVu-6fw
עידן וסטס
- satrug
- משתמש חדש
- הודעות: 4
- הצטרף: ב' ספטמבר 06, 2010 3:01 pm
פרוייקט ה-nBot, קרב רובוטים
![]() על ידי Shynet » א' אוקטובר 17, 2010 11:13 am
על ידי Shynet » א' אוקטובר 17, 2010 11:13 am
שלום לכולם  אמנון פנה אליי אז החלטתי להוסיף לשרשור
אמנון פנה אליי אז החלטתי להוסיף לשרשור
גם את הפרוייקט שלי.
הפרוייקט נבנה במכללת בית ירח, עמק הירדן. המורים שעזרו לנו בצורה בלתי רגילה הם מנשה שם טוב, אייל חברבר, ואהוד לס.
צוות הפרוייקט היה ניר גוטמן ואני (שי), אנחנו היינו הקבוצה האדומה.

הפרוייקט הוא קרב רובוטים בין שני רובוטים הנשלטים מרחוק.
לכול רובוט יש מצלמה, בעזרת המצלמה כול קבוצה שולטת על הרובוט מבלי להיות בחדר.
כול המחשבים (2 מחשבים על כול רובוט, 2 מחשבים לשליטה מרחוק על כול רובוט) מחוברים לשרת.
ההודעות המועברות בין מחשב למחשב עוברות דרך השרת. השרת מנהל את חוקי המשחק כך:
- ניהול זמן כול סיבוב.
- כמות הכדורים בכול נשק (ישנם כמה נשקים לכול רובוט).
- חישוב נקודות החיים של כול רובוט לפי הנשק של הרובוט היריב.
על כול רובוט יש לייזר שאמור לפגוע ברובוט היריב. על כול רובוט יש חיישני "לייזר" (נגדי LDR עם מערכת משוב, ותוכנת VHDL) אשר מזהים פגיעות שהתחרשו.
תמונה של השרת:

כפי שניתן ליראות, בשרת מופיעים הנשקים שכול רובוט "מחזיק", כמות החיים של כול רובוט, לוח תוצאות.
השרת משמיע את הרעשים של כול נשק, מוסיקת רקע "מותחת", קריין שמקריא 10 שניות לפני שנגמר המשחק, ועוד...
תמונה של הלקוח ששולט על הרובוט מרחוק:

כמו שניתן ליראות אנו שולטים על הרובוט באמצעות ג'ויסטייק אלחוטי (של ה-Xbox 360). אנו יכולים להחליף בין הנשקים בעזרת הג'וייסטיק או העכבר, לירות, ועוד...
ברגע שהרובוט נפגע על המסך מופיע מספר נקודות החיים שנותרו לרובוט שלנו ולרובוט היריב (בתמונה זו הנקודות חיים אינן מופיעות).
ברגע שמתרחשת פגיעה, הג'וייסטיק רוטט בכדי להרתיע את השולט על הרובוט שעליו לסגת.
ניתן ליראות כי בצד שמאל יש לנו מקום "שחור" שמה מופיע הווידאו שהרובוט רואה בצד השני של החדר. (הפריימים מועברים בצורה אלחוטית).
בנוסף לפרוייקט בית הספר לקחתי על עצמי מטלה נוספת, שליטה על הרובוט באמצעות חיישן התנועה של הפלאפון (וה-Bluetooth):

סירטונים על הרובוט:
http://www.youtube.com/watch?v=dqZ_a-yW2os - הכרת הרובוט
http://www.youtube.com/watch?v=ytrXM89QucY - קרב בין רובוטים
http://www.youtube.com/watch?v=qE19V8-qT3o - פרוייקט צדדי, שליטה על הרובוט באמצעות חיישן התנועה של הפלאפון וחיבור Bluetooth.
גם את הפרוייקט שלי.
הפרוייקט נבנה במכללת בית ירח, עמק הירדן. המורים שעזרו לנו בצורה בלתי רגילה הם מנשה שם טוב, אייל חברבר, ואהוד לס.
צוות הפרוייקט היה ניר גוטמן ואני (שי), אנחנו היינו הקבוצה האדומה.
הפרוייקט הוא קרב רובוטים בין שני רובוטים הנשלטים מרחוק.
לכול רובוט יש מצלמה, בעזרת המצלמה כול קבוצה שולטת על הרובוט מבלי להיות בחדר.
כול המחשבים (2 מחשבים על כול רובוט, 2 מחשבים לשליטה מרחוק על כול רובוט) מחוברים לשרת.
ההודעות המועברות בין מחשב למחשב עוברות דרך השרת. השרת מנהל את חוקי המשחק כך:
- ניהול זמן כול סיבוב.
- כמות הכדורים בכול נשק (ישנם כמה נשקים לכול רובוט).
- חישוב נקודות החיים של כול רובוט לפי הנשק של הרובוט היריב.
על כול רובוט יש לייזר שאמור לפגוע ברובוט היריב. על כול רובוט יש חיישני "לייזר" (נגדי LDR עם מערכת משוב, ותוכנת VHDL) אשר מזהים פגיעות שהתחרשו.
תמונה של השרת:
כפי שניתן ליראות, בשרת מופיעים הנשקים שכול רובוט "מחזיק", כמות החיים של כול רובוט, לוח תוצאות.
השרת משמיע את הרעשים של כול נשק, מוסיקת רקע "מותחת", קריין שמקריא 10 שניות לפני שנגמר המשחק, ועוד...
תמונה של הלקוח ששולט על הרובוט מרחוק:
כמו שניתן ליראות אנו שולטים על הרובוט באמצעות ג'ויסטייק אלחוטי (של ה-Xbox 360). אנו יכולים להחליף בין הנשקים בעזרת הג'וייסטיק או העכבר, לירות, ועוד...
ברגע שהרובוט נפגע על המסך מופיע מספר נקודות החיים שנותרו לרובוט שלנו ולרובוט היריב (בתמונה זו הנקודות חיים אינן מופיעות).
ברגע שמתרחשת פגיעה, הג'וייסטיק רוטט בכדי להרתיע את השולט על הרובוט שעליו לסגת.
ניתן ליראות כי בצד שמאל יש לנו מקום "שחור" שמה מופיע הווידאו שהרובוט רואה בצד השני של החדר. (הפריימים מועברים בצורה אלחוטית).
בנוסף לפרוייקט בית הספר לקחתי על עצמי מטלה נוספת, שליטה על הרובוט באמצעות חיישן התנועה של הפלאפון (וה-Bluetooth):
סירטונים על הרובוט:
http://www.youtube.com/watch?v=dqZ_a-yW2os - הכרת הרובוט
http://www.youtube.com/watch?v=ytrXM89QucY - קרב בין רובוטים
http://www.youtube.com/watch?v=qE19V8-qT3o - פרוייקט צדדי, שליטה על הרובוט באמצעות חיישן התנועה של הפלאפון וחיבור Bluetooth.
- Shynet
- משתמש חדש
- הודעות: 1
- הצטרף: ש' אוקטובר 16, 2010 11:44 pm
- מיקום: טבריה
![]() על ידי אמנון » ש' יולי 09, 2011 6:40 pm
על ידי אמנון » ש' יולי 09, 2011 6:40 pm
מערכת ביית חכם מופעלת EEG לחולי ALS
פרויקט גמר לתעודת הנדסאי מכטרוניקה של אופיר בינימין ואלון בוקאי במכללת אורט הרמלין , נתניה . בשנת 2011, הפרויקט בוצע בהנחייתי .
הרעיון בפרויקט לאפשר לחולי ALS (ניוון שרירים סופני) אשר מאבדים את היכולת להפעיל את שריריהם הרצונים , להמשיך ולתקשר עם הסביבה וכן להפעיל מערכות הנימצאות בסביבתם הקרובה כגון :
טלויזיה, מזגן , תאורה שתיה וכדומה, וכל זאת באמצעות גלי מוח בלבד ( הפעלת מערכת בעזרת מחשבה בלבד).
חלקי המערכת :
קסדה לקריאת EEG של חבקת EMOTIV
מערכת ביית חכם מבוססת PLCBUS
מערכת מיקום במיבנה הממומשת באמצעות RFID
מערכת לשתית מים מבוססת בקר VEX מנועי סרבו ומשאבה פריסטלטית.
שלט רחוק מופעל מחשב.
מחשב נייד הצמוד לחולה.
שרת להפעלת המערכת המחובר אל המחשב הנייד על בסיס WiFi
מימוש המערכת כלל:
המישתמש מרכיב על ראשו את קסדת הEEG.
בעזרת מחשבה בלבד הוא מניע את העכבר על המסך לתפריט אינטאיטיבי , המציג לו את האפשרויות הקימות בחדר בו הוא נימצא .
כאשר המישתמש בוחר את אחת האפשרויות המערכת שולחת את הפקודה לרכיב הספציפי המתאים , בעזרת מעכת הבית החכם , השלט הרחוק בקר הVEX או בכל דרך אחרת שצריך.
המערכת הינה מערכת פועלת לחלוטין ומוכנה להתקנה בבתי מישתמשים. במערכת ישנו מודול טכנאי , המאפשר הגדרת הורכבת המערכת בבית המישתמש.
המערכת מבצעת בדיקות עצמיות ובמידה ואין תיקשורת עם המישתמש המערכת מזעיקה את המטפל .
הפרויקט זכה במקום הראשון בתחרות חדשנות של כל רשת אורט לשנת 2011 כולל פרס כספי ניכבד.

בסירטון הבא כתבה אשר שודרה בחדשות 10 על המערכת :
http://www.youtube.com/watch?v=C8XYclXYyWA
פרסום על המערכת ב HACKADAY
http://hackaday.com/2011/04/10/brainwav ... -the-home/
אמנון
פרויקט גמר לתעודת הנדסאי מכטרוניקה של אופיר בינימין ואלון בוקאי במכללת אורט הרמלין , נתניה . בשנת 2011, הפרויקט בוצע בהנחייתי .
הרעיון בפרויקט לאפשר לחולי ALS (ניוון שרירים סופני) אשר מאבדים את היכולת להפעיל את שריריהם הרצונים , להמשיך ולתקשר עם הסביבה וכן להפעיל מערכות הנימצאות בסביבתם הקרובה כגון :
טלויזיה, מזגן , תאורה שתיה וכדומה, וכל זאת באמצעות גלי מוח בלבד ( הפעלת מערכת בעזרת מחשבה בלבד).
חלקי המערכת :
קסדה לקריאת EEG של חבקת EMOTIV
מערכת ביית חכם מבוססת PLCBUS
מערכת מיקום במיבנה הממומשת באמצעות RFID
מערכת לשתית מים מבוססת בקר VEX מנועי סרבו ומשאבה פריסטלטית.
שלט רחוק מופעל מחשב.
מחשב נייד הצמוד לחולה.
שרת להפעלת המערכת המחובר אל המחשב הנייד על בסיס WiFi
מימוש המערכת כלל:
המישתמש מרכיב על ראשו את קסדת הEEG.
בעזרת מחשבה בלבד הוא מניע את העכבר על המסך לתפריט אינטאיטיבי , המציג לו את האפשרויות הקימות בחדר בו הוא נימצא .
כאשר המישתמש בוחר את אחת האפשרויות המערכת שולחת את הפקודה לרכיב הספציפי המתאים , בעזרת מעכת הבית החכם , השלט הרחוק בקר הVEX או בכל דרך אחרת שצריך.
המערכת הינה מערכת פועלת לחלוטין ומוכנה להתקנה בבתי מישתמשים. במערכת ישנו מודול טכנאי , המאפשר הגדרת הורכבת המערכת בבית המישתמש.
המערכת מבצעת בדיקות עצמיות ובמידה ואין תיקשורת עם המישתמש המערכת מזעיקה את המטפל .
הפרויקט זכה במקום הראשון בתחרות חדשנות של כל רשת אורט לשנת 2011 כולל פרס כספי ניכבד.
בסירטון הבא כתבה אשר שודרה בחדשות 10 על המערכת :
http://www.youtube.com/watch?v=C8XYclXYyWA
פרסום על המערכת ב HACKADAY
http://hackaday.com/2011/04/10/brainwav ... -the-home/
אמנון
- אמנון
- רובוטריק
- הודעות: 2031
- הצטרף: ש' יולי 09, 2005 5:41 pm
- מיקום: חיפה
כל הכבוד....הכל נראה מושקע ....
![]() על ידי ruba » ג' ספטמבר 27, 2011 10:56 pm
על ידי ruba » ג' ספטמבר 27, 2011 10:56 pm
אין לאף אחד פרוייקט בנושא של חניון ממוחשב שמטרתו להצביע על מקומות פנויים?
תודה
תודה
Ruba Mansour
Biomedical Engineering
Biomedical Engineering
- ruba
- משתמש חדש
- הודעות: 12
- הצטרף: ב' ספטמבר 19, 2011 5:22 pm
פרויקט KeerBot
![]() על ידי Gilad » ב' פברואר 11, 2013 11:16 pm
על ידי Gilad » ב' פברואר 11, 2013 11:16 pm
- Gilad
- חבר פורום

- הודעות: 83
- הצטרף: ג' ספטמבר 22, 2009 6:37 pm
Re: שירשור פרויקטים
![]() על ידי jant18 » ש' מאי 04, 2013 10:16 am
על ידי jant18 » ש' מאי 04, 2013 10:16 am
שלום אני נועם הפרויקט שאני בניתי הוא -
רובוט טנק נשלט על ידי שלט רחוק.
הטנק מזהה מכשולים ויודע לחמוק מהם.
בנוסף לכך הטנק חוסם את כל תדרי הסלולר הקיימים בארץ.
על הטנק מורכבת מצלמה המשדר ווידאו בזמן אמת לטלוויזיה,
דבר המאפשר הפעלת הטנק גם ללא קשר עין.
פרויקט זה זכה מקום שלישי בתחרות ארצית שהתקיימה באוניברסיטת תל אביב.
http://www.youtube.com/watch?v=jL0wXAGj5I0
רובוט טנק נשלט על ידי שלט רחוק.
הטנק מזהה מכשולים ויודע לחמוק מהם.
בנוסף לכך הטנק חוסם את כל תדרי הסלולר הקיימים בארץ.
על הטנק מורכבת מצלמה המשדר ווידאו בזמן אמת לטלוויזיה,
דבר המאפשר הפעלת הטנק גם ללא קשר עין.
פרויקט זה זכה מקום שלישי בתחרות ארצית שהתקיימה באוניברסיטת תל אביב.
http://www.youtube.com/watch?v=jL0wXAGj5I0
- jant18
- משתמש חדש
- הודעות: 9
- הצטרף: א' יולי 29, 2012 5:17 pm
Re: שירשור פרויקטים
![]() על ידי hila2012 » א' יולי 21, 2013 10:45 am
על ידי hila2012 » א' יולי 21, 2013 10:45 am
עם כל הטכנולוגיה והרובוטיקה הקיימת, בעוד כמה שנים כבר לא נצטרך ללכת לחברה שעוסקת בתחום של תיקון מחשבים ניידים , המחשב יתוקן בעצמו כאשר ייתקל בתקלה מסוימת.....
- hila2012
- משתמש חדש
- הודעות: 1
- הצטרף: א' נובמבר 04, 2012 2:01 pm
Re: שירשור פרויקטים
![]() על ידי liatamir » ה' אוגוסט 15, 2019 9:31 am
על ידי liatamir » ה' אוגוסט 15, 2019 9:31 am
היי מומחים לרובוטיקה
שאלה קטנה - יש מומחים או כאלו שמכירים חברות מומלצות לחיבור מבנה לחשמל חכם עבור מכשירים נקודתיים?
שאלה קטנה - יש מומחים או כאלו שמכירים חברות מומלצות לחיבור מבנה לחשמל חכם עבור מכשירים נקודתיים?
- liatamir
- משתמש חדש
- הודעות: 3
- הצטרף: ו' יוני 14, 2019 11:22 pm
High Rated Product Guide
![]() על ידי FrankJScott » ו' אוקטובר 06, 2023 5:39 am
על ידי FrankJScott » ו' אוקטובר 06, 2023 5:39 am
Please try Google before asking about High Rated Product Website 4f6fe70
- FrankJScott
- רובוטריק
- הודעות: 1149
- הצטרף: ה' אוקטובר 05, 2023 6:33 pm
- מיקום: SLOT GACOR
Updated Auto Daļas Tips
![]() על ידי FrankJScott » ב' אוקטובר 09, 2023 9:35 pm
על ידי FrankJScott » ב' אוקטובר 09, 2023 9:35 pm
In reply to the lady asking about autozone car battery replacement, fiat car parts, discount auto parts near me, boho car accessories, gm auto parts, olympic auto parts, I highly recommend this VAG 4K2853189A2UD Auto Part or car wiper motor, levans auto parts, car part number search, deadpool car accessories, lone star auto parts, scrap yard car parts near me, as well as this VAG 760858247A3HS ABDECKUNG not to mention VAG 760867165AULX ARMLEHNE which is as good as fierge auto parts, bmw car parts, auto parts direct, rockauto dodge, new car battery, car wiper water, alongside all VAG 5QF129565B ANSAUGROHR as well as sailor moon car accessories, auto body parts warehouse, car arm, car decoration accessories, ebay auto parts discount, auto junk yards near me, as well as this VAG 3G9839644E7Z7 Auto Part as well as duralast car battery, heat shield car, subaru auto parts, spring lake auto salvage, autopart near me, used car parts near me, as well as VAG 5NA853687JN0R Auto Part which is about ford replacement parts, the auto store, brake caliper price autozone, advance auto parts store near me, oreillys auto parts near me, frontier auto parts, not to mention this VAG 4M8853190AN14M Auto Part alongside all auto parts near me now, islamic car accessories, sailor moon car accessories, auto parts outlet, ennis auto salvage, auto plus auto parts, not to mention this VAG 2K9941006 Auto Part as well as autozone batteries, fiat parts online, 4l60e corvette servo, auto parts co, king auto salvage, ebay truck parts, on top of VAG 3CN853688GFOD Auto Part as well as car junkers near me, car inner tube, honda dealership parts, fast auto parts, u pull auto parts, auto zone number, which is also great. Finally, have a look at this VAG 1S2614106C Auto Part with fiat parts, auto polish, mercedes motor, advance auto near me, summit auto parts, lkq parts online, for good measure. Check more @ [url=http://www.66682999.com/viewthread.php?tid=1324197&pid=1519000&page=1&extra=#pid1519000]Recommended Auto Daļas 5d74f6f
- FrankJScott
- רובוטריק
- הודעות: 1149
- הצטרף: ה' אוקטובר 05, 2023 6:33 pm
- מיקום: SLOT GACOR
מי מחובר
משתמשים הגולשים בפורום זה: Google [Bot] ו 5 אורחים