נושאים בתפעול
מנועי DC – הרמן לזרוביץ'
כתב: אסף פוניס
התפתחות הזרם במנוע
במנוע DC עקב שינוי מתח מתבצע שינוי זרם, שכתוצאה ממנו משתנה מומנט המנוע. אם יורד מתח המנוע, יורד בעקבותיו הזרם הזורם דרכו וכתוצאה מכך יורד גם המומנט במוצא לפי I2. מסיבה זו על מתכנת הרובוט לדאוג ל–PWM מינימלי כזה, שיאפשר מספיק זרם למומנט סיבוב. לאחר ההתנעה של המנוע נוצר מתח מתנגד למתח הנכנס המכונה כוח אלקטרו מניע (כא"מ) מושרה (back emf) שנסמן אותו באות E. אם נקצר את הדקי המנוע, נקבל עומס מירבי למנוע וכתוצאה מכך כא"מ מושרה מירבי, לכן המנוע לא יסתובב.
![]()
דוגמה:
בעת ההתנעה E=0 ואז:
ככל שהמנוע
צובר מהירות, E≈V ואז I יורד לערך נמוך ביחס לערכו בהתנעה בעקבות התנגדות E. לכן הזרם ירד מ- A6 לערך אפשרי של A0.5.
באופן כללי, E=K∙Φ∙n
כאשר:
E = כא"מ מושרה
K = קבוע
F = שטף
מגנטי (קבוע)
n = מס' סיבובים לדקה
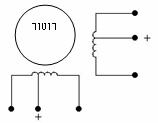
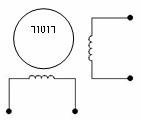
סכמת תמורה של המנוע:
![]()
R ההתנגדות הפנימית של המנוע,
ו-L ההשראות העצמית של הרוטור. כאן V-E יהיה מקור המתח של המעגל,
ונתייחס לו כקבוע, מאחר והדיוק כאן נעשה עבור זמנים קצרים בהרבה מהשתנות E.
כידוע,
במעגל RL המשוואה לזרם היא ![]()
ופתרונה:
 במקרה שלנו בזמן t=0,
הזרם I0=0
ולכן:
במקרה שלנו בזמן t=0,
הזרם I0=0
ולכן:
ואם נתאר את
ההתפתחות בזמן של הזרם, נקבל:
כמובן, Imax שונה בשלבים שונים של פעולת המנוע, ותלוי ב-E ולכן במהירות המנוע, כפי
שהוסבר לעיל.
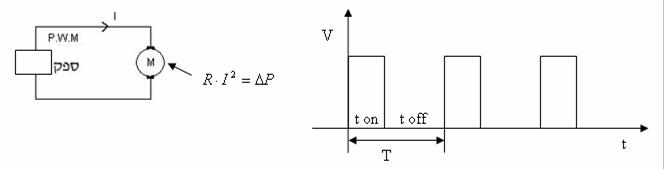
P.W.M – Pulse Width Modulation
על מנת לשלוט במהירות המנוע, בקר המנוע
מפעיל ומפסיק את הזרם לסירוגין כאשר המתח קבוע, וכך מספק מתח ממוצע שונה למנוע.
טכניקה זו קרויה PWM (Pulse Width Modulation), ומודגמת באיור שלמטה, כאשר V הוא המתח על המנוע ו-t הוא
הזמן. אות הבקרה כאן הוא גל ריבועי, בו זמן המחזור הוא tperiod והזמן בו הגל נמצא המתח לוגי '1' הוא ton. המתח הממוצע, וכתוצאה מכך, מהירות המנוע, ניתן
לשליטה ע"י שינוי רוחב-הפעימה (Duty Cycle
או pulse-width ratio):
![]()
![]() תנאי:
תנאי:
גרף P.W.M
כללי:

להלן גרף
המתאר את התנהגות הזרם כתוצאה משינוי המתח בשיטת P.W.M:
המתח שרואה
המנוע הוא המתח הממוצע על פי חלוקת הזמנים Ton ו-Toff.
כפי שניתן
לראות מהגרף:
בזמןToff , הסליל מתפרק והזרם מתחיל לדעוך. הזרם אינו מספיק להגיע לערכו
המכסימלי כאשר מתחילה הדעיכה שלו, והוא גם אינו מספיק להגיע לערכו המינימאלי לפני
שמתחילה העלייה הבאה שלו.
כשמפעילים
מנוע, יש התפתחות אקספוננציאלית של הזרם. צריך לספק 63% מהזרם הנומינלי. מעבר לכך
הזרם יהפוך לחום. ישנה התנגדות אוהמית של המנוע, ועקב הפסדי נחושת, ההספק: ΔPCu=I2R הופך לחום. יש חברות שממליצות שהמנוע יתחמם, כי אז
הנצילות מקסימלית. שינוי ב-Ton יגרור אוטומטית שינוי ב-Toff,
היות וסכומם קבוע, ולכן יגרם גם שינוי בזרם. אם למשל נקטין את Ton,
הרי שדעיכת הזרם תהיה גדולה יותר (כי Toff גדול יותר).
מכאן נובעות
מספר מסקנות לגבי השימוש בשיטת PWM שניתן לבצעה באמצעים אלקטרוניים, וברוב המקרים
באמצעות שימוש במיקרו-בקר. כזכור כשעובדים עם PWM, התדר הוא קבוע.
נשאלת השאלה באיזה תדר לעבוד?
מצד אחד
המנוע לא יוכל להגיב לתדרים גבוהים מדי, ושם גם המתח אמנם ישתנה אך הזרם כמעט ולא
ישתנה כי אין לו זמן דעיכה. בתדרים נמוכים מדי הסליל לא מספיק להטען ואז מתקבלים
פולסים בודדים שמזכירים מנוע צעד. בכל צעד זו בעצם התנעה מחדש ולכן דרגת ההספק של
בקר המנוע עלולה להנזק.
הפתרון הוא
התאמת התדר ל- τ (זמן עד שמתקבל זרם של 63% מהזרם הנומינלי) על מנת
לא לקבל מצב שבו הזרם לא ישתנה כלל, כתוצאה ממרווחי זמן קטנים בין שינויי המתח.
התדר
המכסימלי המומלץ הינו: fmax=150Hz. במנועים מאיכות טובה, התדר
המרבי המומלץ גבוה בהרבה.
חיבור דיודה הפוכה למנוע
ברגע ניתוק
המתח מהספק, קיים dl/dt גדול מאוד. כי זמן הניתוק קצר מאוד ו- L*(dl/dt) יוצר כא"מ מושרה הפוך שמגיע לעשרות עד מאות וולטים.
במנוע של 12V יכול מתח זה להגיע ל- 80V. לכן יש צורך להציב דיודה הפוכה
לסליל (כלומר להדקים החיובי והשלילי של המנוע). עקב התנגדות נמוכה של הדיודה, המתח
הגדול יעמיס את הספק ולא את מעגל הבקרה. זה נכון אגב גם לסליל של ממסר. שם
הספייקים אפילו יותר גרועים ממה שקורה במנוע ולכן דיודה הפוכה הכרחית שם.
מכאניקת המנוע
P1 הוא הספק חשמלי בכניסה למנוע
= U*
![]()
נצילות התמסורת hT היא 60% לערך.
בדרך כלל
רשום לגבי תמסורות שהן חד כיווניות (non reversible), כלומר שלא ניתן להפוך את
כיוון הסיבוב בבת אחת, אחרת נוצר מומנט על התמסורת שיכול לשבור אותה (אלא אם מדובר
בתמסורת פלנטרית). לכן לפני הפיכת כיוון סיבוב במנוע, צריך לעצור אותו ל- 2 שניות
ואז להפוך כיוון.
המומנט
הכללי של המנוע כפי שמקבלים אותו מהספק המוצא:
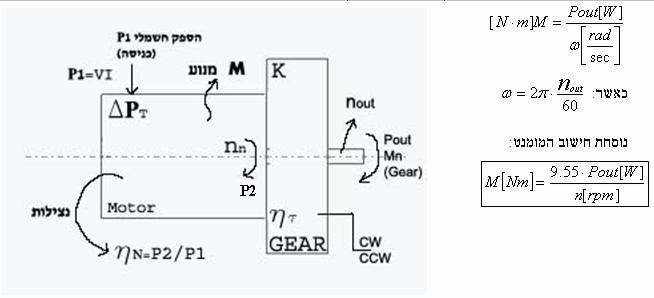
זה הקשר בין
הספק מכני על ציר המנוע במוצא לבין המומנט ומהירות הסיבוב. בדרך כלל נשתמש במנועים
קטנים ולכן בד"כ נמדד המומנט ביחידות מילי ניוטון מטר, M[m*Nm].
Gear
שיכול הסתובב לשני הכיוונים, נקרא Gear פלנטארי.
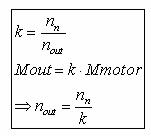
k הוא יחס התמסורת השוה ליחס בין מומנט
המוצא למומנט המבוא לתמסורת. היות והיחס בין המומנט למהירות הסיבוב הוא יחס הפוך,
הרי ש- k שווה גם ליחס בין מהירות המבוא
למהירות המוצא של התמסורת. nn שהיא מהירות סיבוב נומינלית תהיה בסדר גודל של אלפי
סלד"ים ואילו nout תהיה
נמוכה בגלל התמסורת.
מספר חישובי
עזר:
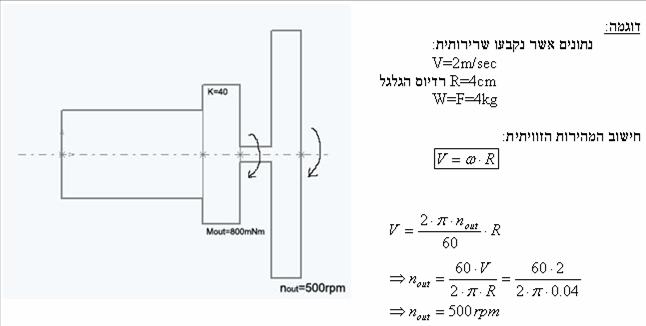
אפשר לשחק
עם V ו- R בכדי לקבל מהירות אחרת. נזכור כי הספק הוא גם מכפלת
כוח במהירות.
![]()
חישבנו 2Kg כי יש שני מנועים ולכן המשקל
מתחלק ל- 2.
מסקנה: קביעת מהירות מקסימלית משפיעה רבות על
הנתונים
המתקבלים, לכן צריך לבדוק בדיוק מה הדרישות
מהמנוע לפני בחירתו!
הספק הכניסה
לא משתנה והוא שווה ל: P1=U*I. אם הנצילות 80%,
צריך במקום 40W להעביר 50W.
בחישוב המומנט במשוואה שבתחילת העמוד לקחנו הספק מוצא של 40W.
אם יחס
התמסורת k
הוא 40, אז מהירות סיבוב נומינלית של המנוע צריכה להיות:
n=k*nout=40*500=20,000
rpm.
מהירות
המוצא כאן גבוהה מדי לרוב היישומים. מהירות של 0.5m/s היא הגיונית יותר.
קיים מומנט
אינרציה בציר המנוע. מומנט האינרציה של דיסקה שווה ל- mr2. מומנט האינרציה בציר דרוש א.
בהתנעה, ב. בשינוי מהירות. בהתנעה, מומנט
האינרציה קובע את זמן ההתנעה כאשר הזרם גדל ואיתו גדל המומנט. בעצירה זה בדיוק
להיפך, הזרם גדל והמומנט קטן.
![]()
ואצלנו m=G/g ומכאן I=G*D2 שהוא מומנט תנופה.
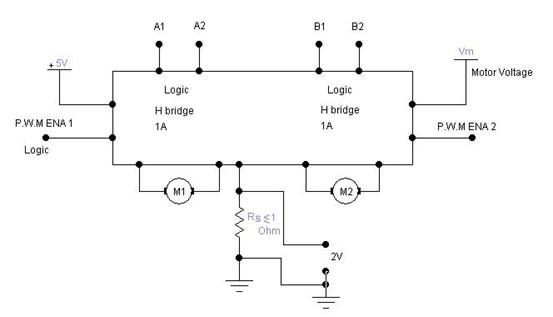
רכיבי בקרת מנוע
ניקח לדוגמה
את רכיב בקרת המנוע L293:
|
|
A2 |
A1 |
E1 |
|
STOP |
0 |
0 |
1 |
|
Right |
1 |
0 |
1 |
|
Left |
0 |
1 |
1 |
|
BRK |
1 |
1 |
1 |
נשים לב
לעובדה שתפקוד המנוע לפי הטבלה מותנה בכך ש: 'E1='1. (אותה טבלה נכונה גם לגבי
הצד השני של הרכיב המטפל במנוע שני). שינוי מהירות המנוע מתקבל מהזנת פולס PWM לרגל
ENA1 או ENA2. הזרם המירבי למנוע הוא 1A וביחד לשני המנועים 2A.
זיהוי
עליית זרם במנוע (ע"י היתקעות הרובוט בחפץ המונע המשך נסיעה לדוגמה)
בעזרת רכיב
זה ניתן לדעת מתי הרובוט נתקל בחפץ או בקיר ולעצור אותו מידית, על מנת לא לגרום
לנזק למנועים. נשתמש ברכיב שנקרא R Sensor שמזהה עליה בזרם, וכאשר נזהה
עליה כזו, נעצור את המנועים. בהנחה שערך הנגד Rs הוא 1Ω, והזרם הוא מירבי ושוה ל- 2A, הרי שהמתח הנופל על הנגד הוא 2A*1Ω=2V. כשהמנוע נעצר, הזרם גדל ואז יגדל איתו המתח ויעלה
ל- 2.5V או 3V. זאת אפשר לגלות או על ידי הזנת המתח לקו A2D ואז התוכנה תדאג לעצירת
המנועים, או שמעבירים המתח למגבר משווה שמעל ערך מסוים עוצר המנועים. כאן אנו לא
יודעים איזה מהמנועים נעצר, במקרה שרק אחד מהם נעצר.
רכיב נוסף
שאפשר להשתמש בו הוא ה- L 298D. מדובר ברכיב דומה אך עם תוספת 4 דיודות הגנה ל- H bridge
ו- GND עם נקודת חיבור ל- Rs לכל מנוע בנפרד. (בניגוד ל L
293 ששם הנגד
משותף לשני המנועים). הבדל נוסף הוא תמיכה בעד 2A לכל ערוץ מנוע.
זרמים
גבוהים כאלו של 2A מחייבים שימוש במפזר חום,
כיוון שפיזור ההספק הוא גדול למדי. מנוע DC הוא מנוע טוב, אלא שהבקרה
עליו מורכבת ובעייתית. מנוע מסוג אחר הוא מנוע צעד.
להסבר נוסף
על בקרת מנועים, ראה מאמר בנושא במדור החומרה באתר.
מנוע צעד – סטפר
בקרה: שני חוטים ברמת TTL 1/0 לוגי
חוט ראשון – בקרת כיוון סיבוב (Dir).
חוט שני – שעון (Clk) (הגורם לסיבוב)
ישנם גם קוי
בקרה נוספים כמו צעד/חצי צעד (FS/HS)או מצב של חסכון באנרגיה כשהרכיב לא פעיל.
כל פולס
שעון גורם למנוע להסתובב בצעד אחד. צעד שקול לזווית. צעד יכול להיות 1.8° או 7.5°
ועוד. מנוע צעד שגודל הצעד שלו הוא 1.8°/step, יקבל עשרים פולסים, הוא יסתובב 36° או עשירית סיבוב שלם. ככל
שתדירות השעון תעלה, כך תעלה מהירות מנוע הצעד. במנוע צעד אין פחמים להחלפת כיוון
כמו במנוע DC, ולכן אין צורך לעצור את המנוע כשהופכים את כיוון הסיבוב.במנוע
צעד יש גם אפשרות לבקרת זרם
בקרת עצמת
הזרם לסלילים (CC) Current Control : אנו יכולים לקבוע את עוצמת
הזרם הזורם דרך הסלילים.
מנועי צעד מסווגים לשני סוגים עיקריים:
|
Unipolar: 5,6 חוטים
|
4 חוטים
|
במידה
וברשותינו רכיב בקרת מנוע Bipolar והמנוע שלנו הוא Unipolar, נוכל למצוא את שני ההדקים
הקיצוניים של כל סליל ולהתייחס אליהם כאילו הם הדקי הסלילים של מנוע Bipolar.
לצורך כך נמדוד את התנגדות החוטים בכל שלישיה (ניתן לזהות בירור שתי שלישיות נפרדות
של חוטים), זוג החוטים שההתנגדות ביניהם היא הגדולה ביותר בכל שלישיה, יהיו זוג
החוטים שיחוברו לרכיב הבקרה.
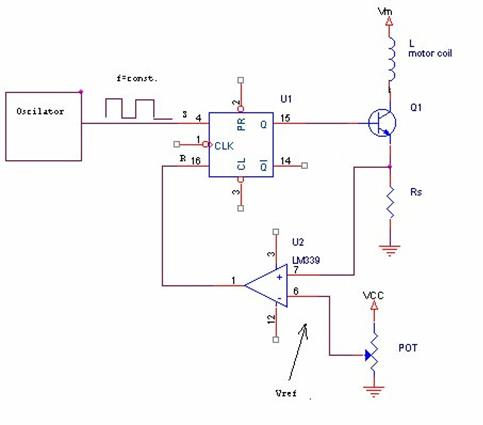
בקרת זרם (CC)
בשרטוט הבא,
מוציאים ממתנד גל בתדר קבוע. הגל עבר לרגל set של הפליפ-פלופ, ממנו הוא עובר
לטרנזיסטור הספק שהקולקטור שלו מחובר לסליל מנוע, והאמיטר דרך נגד Rs
לאדמה. (יש רכיב של חברת אריקסון שמכיל את כל מה שדרוש). האמיטר של הטרנזיסטור
מוזן למשווה, שהכניסה השניה שלו היא מתח ייחוס Vref. מוצא המשווה מחובר חזרה דרך
רגל Reset לפליפ פלופ. כל פולס מהמתנד כשעולה ל- '1', יניב '1' ביציאה Q, ואז מגיע
זרם לסליל ומגיע זרם גם לנגד Rs. ומכאן נוצר מתח, U=Rs*I. המתח מגיע למשווה שמצידו
השני מחובר Vref. המתח על הנגד Rs מתחיל לעלות כי הזרם שזורם דרכו עולה. כשמגיע לערך
מתח הייחוס Vref, מוצא המשווה המחובר לרגל R ידאג לביצוע Reset
ואז יפסק הזרם. כך מווסתים את הזרם במעגל. המומנט המתקבל יהיה: M=K*I2, ומכאן ששינוי קטן בזרם יניב שינוי גדול במומנט המתקבל.
,בעלי אתר זה לא ישאו באחריות כלשהי לכל נזק, כספי או אחר
שייגרם במישרין או בעקיפין משימוש במידע המצוי באתר זה
כל הזכויות שמורות לאסף פוניס, גיא יונה ואלי קולברג ©
אין להעתיק תכנים מאתר זה ללא רשות בכתב ממנהלי האתר