בקרת מנועי זרם
ישר – מאת אלי קולברג וגיא יונה
היות ורוב
יישומי הרובוטיקה מכילים מנועי זרם ישר, בין אם למטרות הנעה ובין אם לצורך פעולות
אחרות, יש לתכנן וליישם בקרת כיוון ומהירות למנועי זרם ישר, כך שתהיה שליטה על
כוון נסיעת הרובוט ומהירותו.
עקרון פעולת מנוע זרם ישר
מנוע זרם
ישר הוא למעשה כריכה של חומר מוליך שזורם דרכה זרם חשמלי והיא מסתובבת בשדה מגנטי
עקב הכוחות הפועלים עליה לפי כלל היד הימנית (במקום שכוון הזרם הוא לתוך השדה
הניצב, יפעל כוח בניצב למישור הכריכה כלפי מעלה ואילו במקום שהזרם יוצא מהשדה יפעל
כוח דומה בכוון ניצב וכלפי מטה, מה שיוצר מומנט הגורם לסיבוב). בנוסף לכך קיים
המחלף (Commutator), שתפקידו להחליף את קוטביות ההדקים בכל חצי סיבוב,
בכדי שהסיבוב יתבצע כיאות.
המעבד איננו
מסוגל להניע את המנועים ישירות, כיוון שהוא לא מספק מספיק זרם. כדי להתגבר על כך,
הזרם מסופק למנועים ע"י בקר המנועים, והמעבד רק מעביר את אותות השליטה והבקרה
לבקר זה. בקרים אופייניים של מנועי DC משתמשים בטופולוגיה בסיסית הקרויה גשר-H (H-Bridge),
שהיא למעשה 4 מפסקים המחוברים בצורה דמוית H למנוע. ניתן ליישם מפסקים אלו
באמצעות ממסרים, טרנזיסטורים (כמו באיור), MOSFET (Metal-Oxide
semiconductor field effect transistors) או מעגל משולב (שבב) לבקרת מנועים.
המעגל באיור
מתאר למעשה ארכיטקטורה פשוטה של מעגל בקרת מנועים. המעגל מורכב למעשה משני חלקים:
חלק לוגי צירופי, ו-H-Bridge. תחומי העבודה של הטרנזיסטורים במעגל זה הם תחומי הרוויה והקטעון, כך שהם
משמשים כמתגים.
הטרנזיסטורים
ב-H-Bridge
משנים את תחומי העבודה שלהם באופן כזה שיפעיל את המתח על המנוע
בקוטביות מסוימת, שתגרום למנוע להסתובב בכיוון אחד, או בקוטביות ההפוכה, שתסובב את
המנוע בכיוון ההפוך. לדוגמה, כאשר הטרנזיסטורים S1 ו-S4 באיור מצויים בתחום
הרוויה, (ומשמשים כמתגים סגורים) ואילו הטרנזיסטורים S2 ו-S3 מצויים בתחום הקטעון
(ומשמשים כמתגים פתוחים), הזרם יעבור במנוע משמאל לימין. כאשר הטרנזיסטורים S1
ו-S4 באיור בתחום הקטעון, והטרנזיסטורים S2 ו-S3 בתחום הרוויה, הזרם יעבור במנוע
מימין לשמאל. אם כל הטרנזיסטורים בתחום הקטעון המנוע יסתובב בחופשיות, וכאשר כולם
בתחום הרוויה (הזרם עובר בחופשיות בכל חלקי המעגל) - המנוע יבלום. יש לשים לב, כי
הטרנזיסטורים 1S, S3 הם מסוג NPN,
ואילו הטרנזיסטורים S2, S4 הם מסוג PNP.
למעגל הלוגי
נכנסים שני קווי קלט: קו האפשור, וקו הכיוון. המעגל, המורכב מ-4 שערי AND ושער
NOT אחד, מספק את פונקצית
הבסיס לכל אחד מהטרנזיסטורים ב- H-Bridge, כך שיפעלו בהתאם לטבלה שלמטה. כאשר קו האפשור במצב לוגי '0',
הפלט של כל שערי ה-AND יהיה '0', ולא יעבור זרם ב- H-Bridge. כאשר קו האפשור במצב לוגי '1',זוג הטרנזיסטורים
שימצאו בתחום הרוויה תלויים בערך המצוי בקו הכיוון.
|
מצב לוגי של קו האפשור |
מצב לוגי של קו הכיוון |
פעולת המנוע |
|
1 |
1 |
סיבוב לכיוון אחד. |
|
1 |
0 |
סיבוב לכיוון שני. |
|
0 |
X |
עצירת המנוע |
טבלה:
סיכום אופן פעולת קווי בקרת המנוע לקביעת כיוון הסיבוב
על מנת
לשלוט במהירות המנוע, המפסקים נפתחים ונסגרים בקצב שונה על מנת לספק מתח ממוצע
שונה למנוע. טכניקה זו קרויה PWM (Pulse Width Modulation), ומודגמת באיור שלמטה, כאשר V הוא
המתח על המנוע ו-t הוא הזמן. למשל - כאשר טרנזיסטורים S1 ו- S4
משמשים ל-PWM וטרנזיסטורים S2 ו-S3 נשארים בתחום הקטעון, המתח במנוע יהיה זהה ובעל
אותה הקוטביות כמו מתח הכניסה כאשר S1 ו-S4 סגורים, ו-V0 כאשר הם פתוחים. בשיטה זו
מוכנס לקו האפשור גל ריבועי, בו זמן המחזור הוא tperiod והזמן בו הגל נמצא
המתח לוגי '1' הוא ton. המתח הממוצע, וכתוצאה מכך, מהירות המנוע, ניתן
לשליטה ע"י שינוי רוחב-הפעימה (Duty Cycle או pulse-width
ratio):
![]()
הזנת גל ה-PWM מבוצעת בתוכנה.
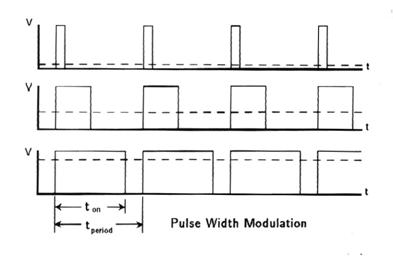
PWM
של מתח הכניסה יוצר מתחים ממוצעים שונים. הקו המלא הוא הגל הריבועי המסופק לקו
האפשור, והקו המקווקו מייצג את המתח הממוצע המתקבל במנוע
הזכרנו קודם
לכן כי הפשטת המתגים ב-
H-Bridge יכולה להיות
ממומשת במספר דרכים. ממסרים יכולים להפעיל ולכבות מנועים, ואף לשלוט על כיוונם,
אולם אין להשתמש בהם במערכות הדורשות בקרה על מהירות המנוע בשיטת PWM, בשל
מהירותם התגובה האיטית והבלאי הגבוה שלהם. מימושים של מצב-מוצק (Solid state),
כמו טרנזיסטורים דו-קוטביים (Bipolar) ו-MOSFET-ים נפוצים יותר במימושים
כאלו.
בלי כל קשר לאופן המימוש של המתגים,
נוצרות מספר בעיות כאשר מפסיקים עומסים השראתיים, כמו מנועים. ידוע כי המתח המושרה
על סליל ההשראה (מנוע זרם ישר, למשל) הוא פרופורציונלי לקצב השינוי של הזרם דרכו:
![]()
אם הזרם העובר בסליל מגיע לרמה קבועה
ואיננו משתנה, המתח עליו הוא V0 והסליל מתנהג כמו מוליך רגיל.
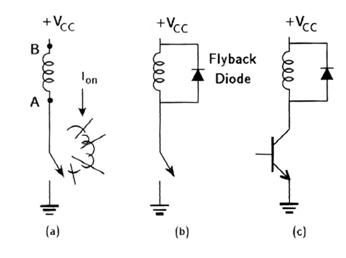
(a) שינוי הזרם בסליל עקב פתיחת המפסק
משרה מתח גבוה על הסליל, ויוצר קשת חשמלית על המפסק.
(b)
דיודת חזרה מגינה על המפסק. (c) טרנזיסור המשמש כמתג חייב
להיות מוגן גם כן.
האיור מדגים
מה קורה כאשר מצב הזרם הקבוע משתנה בבת אחת עקב פעולתו של המפסק. הזרם לא יכול
לרדת ל-0 בבת אחת, כך שמתח
![]()
מושרה בכיוון הפוך לכיוון הזרם. כך, נקודה A תהה בפוטנציאל גבוהה מזה
שבנקודה B, בה הפוטנציאל הוא Vcc. אף על פי שהזרם לא משתנה
באופן מיידי כאשר המפסק נפתח, הוא משתנה
מהר מאוד, וככל שמהירות השינוי שלו גדלה, כך גבוה יותר המתח המושרה הנוצר. הדבר
תלוי בגודל הסליל, בסדר הגודל של הזרם העובר בו ובמהירות פתיחת המפסק, אך המתח הנוצר
באותו רגע עלול להגיע לכמה מאות וולטים ואף יותר, מספיק כדי לקשת את המפסק ולשרוף
אותו.
הפתרון
הפשוט לבעיה זו הוא למקם דיודת חזרה (Flyback Diode) במקביל לסליל ההשראה, בכיוון
ההפוך לכיוון הזרם העובר בו. כך המתח הנוצר בפתיחת המעגל יקוצר ע"י הדיודה, וייווצר
מסלול חזרה עבור הזרם, שיחזור ישירות למקור הכוח. מפסקי מצב-מוצק (טרנזיסטורים, MOSFET
ומעגלים משולבים, אך באחרונים הגנות אלו כבר מובנות בשבב) הם פגיעים לעליות מתח
פתאומיות בדיוק כמו מפסקים מכניים, ולכן יש למקם דיודת חזרה גם (ובעיקר) במקרים
אלו.
,בעלי אתר זה לא ישאו באחריות כלשהי לכל נזק, כספי או אחר
שייגרם במישרין או בעקיפין משימוש במידע המצוי באתר זה
כל הזכויות שמורות לאסף פוניס, גיא יונה ואלי קולברג ©
אין להעתיק תכנים מאתר זה ללא רשות בכתב ממנהלי האתר

